四叉树是一种非常好的分割影像等二维数据的手段。可以利用四叉树对影像进行压缩,例如Github上的Quads项目十分形象生动地展示了利用四叉树分割图像的效果。
如下是对一幅照片迭代了4096次分割以后的效果。
 原图
原图
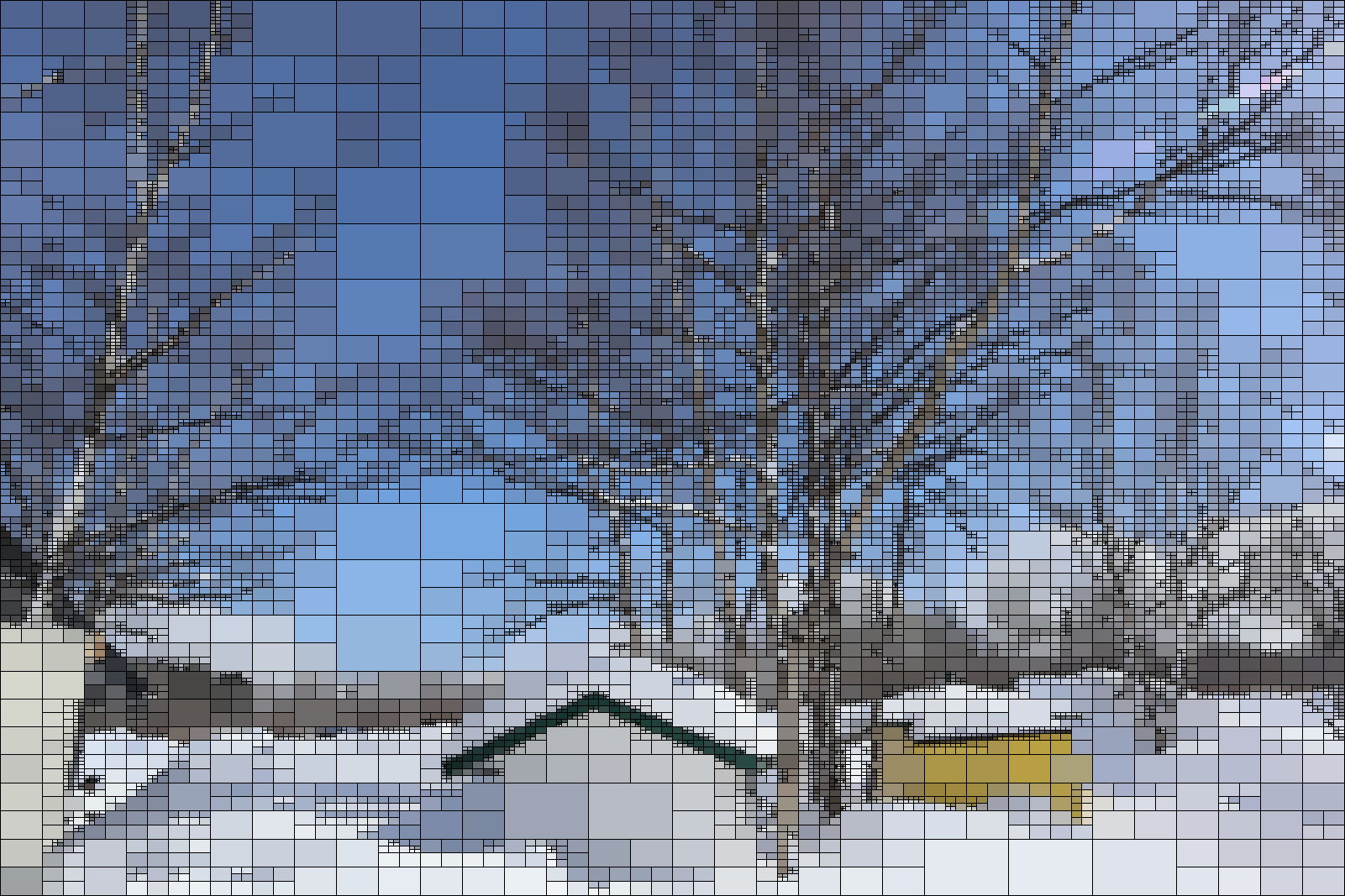 四叉树分割后的结果
四叉树分割后的结果
在Github中还有一个专门用来空间检索的Python四叉树代码,叫做[Pyqtree]https://github.com/karimbahgat/Pyqtree。其基本用法如下,非常简单。
# coding=utf-8
from pyqtree import Index
if __name__ == '__main__':
# 构建空间索引四叉树
spindex = Index(bbox=(0, 0, 100, 100), max_depth=5)
# 向树中插入三个节点,第一个参数为节点内容,第二个参数为节点范围
spindex.insert('duck', (50, 30, 53, 60))
spindex.insert('cookie', (10, 20, 15, 25))
spindex.insert('python', (40, 50, 95, 90))
# 调用求交函数
print spindex.intersect((40, 40, 50, 50))
但上面的代码都有些问题,就是其不能保存分割的四叉树本身的结构,不能做到数据结构的持久化。也就意味着无法根据得到的四叉树来恢复影像,只能用来对影像进行压缩(分割)。 因此为了克服这个问题,本篇博客主要研究如何将四叉树的数据结构存到文件中,并且还可以通过读取文件数据恢复树的结构。
1.设计存储结构
主要想法也很简单,通过以编码串的方式定位四叉树节点。具体思路是对于一个四叉树结构,先找到它的最深深度。然后以该深度建立一个空的完全四叉树(除最后一层外每个节点都有四个子节点)。
我们需要的就是将真实四叉树中节点的位置对应到完全四叉树上,即可定位到其在该层的位置,将每一层的位置组合成一个字符串,即可进行定位。
在实际操作中,由于Python没有指针,因此按照每一层的最大容量建立列表,以列表的索引表示树的层之间的连接关系。
在本代码中,最多设计了14层四叉树(包含根节点)。根节点为第一层,如下表所示。
 因此可以通过
因此可以通过QuadCode(自己起的名字,即上文提到的编码串)的长度可算出某节点位于哪一层以及搜索路径。例如”1312”,根据规则,即可知道它位于完全四叉树的第三层,它的搜索路径为1-3-12,即根节点-第二层第3个节点-第三层第12个节点。
此外,在代码中还给出了QuadCode与PosCode的关系。PosCode即是真实四叉树中的位置,如上面提到的这个节点,以PosCode表示即为”1-3-4”,即根节点-三号节点-四号节点。
2.代码编写
利用Python实现了上述功能,并利用OpenCV绘制出了四叉树结构。
# coding=utf-8
import numpy as np
import cv2
# 每一级索引所占用字符宽度
LEVEL_LENGTH = [1, 1, 2, 2, 3, 4, 4, 5, 5, 6, 7, 7, 8, 8]
# 拆分字符串索引
INDEX_TABLE = [0, 1, 2, 4, 6, 9, 13, 17, 22, 27, 33, 40, 47, 55]
# 每一级最多容纳节点个数
LEVEL_NUM = [1, 4, 16, 64, 256, 1024, 4096, 16384, 65536, 262144, 1048576, 4194304, 16777216, 67108864]
def drawNodes(tree, node_color=(0, 0, 0), final_color=(0, 0, 255), node_size=20, node_space=50, margin_size=50,
level_height=200, showNone=True):
"""
绘制树所包含的节点,没有连线。
空白圆圈表示没有节点,黑色圆圈表示有下一级节点的节点,红色圆圈表示无下一级节点的节点
:param tree: 需要画的树
:param node_color: 非最终一级节点颜色,默认黑色
:param final_color: 最终一级节点颜色,默认红色
:param node_size: 节点大小,默认20
:param node_space: 节点所占空间,默认50
:param margin_size: 边缘大小,默认50
:param level_height: 每一级高度,默认200
:param showNone: 是否绘制空节点,默认绘制
:return: 影像
"""
height = (tree.__len__() - 1) * level_height + margin_size * 2
width = node_space * (tree[-1].__len__() - 1) + margin_size * 2
center_h = width / 2
blank_img = np.zeros([height, width, 3], np.uint8) + 255
for level in range(len(tree)):
for node in range(len(tree[level])):
start_x = center_h - (len(tree[level]) - 1) * (len(tree) - level) * node_space / 2
if tree[level][node] is not None:
if tree[level][node] == 1:
cv2.circle(blank_img,
(start_x + (len(tree) - level) * node_space * node, margin_size + level_height * level),
node_size,
color=node_color,
thickness=-1,
lineType=cv2.LINE_AA)
else:
cv2.circle(blank_img,
(start_x + (len(tree) - level) * node_space * node, margin_size + level_height * level),
node_size,
color=final_color,
thickness=-1,
lineType=cv2.LINE_AA)
else:
if showNone:
cv2.circle(blank_img,
(start_x + (len(tree) - level) * node_space * node, margin_size + level_height * level),
node_size,
color=node_color,
thickness=1,
lineType=cv2.LINE_AA)
else:
pass
return blank_img
def drawNodes2(tree, node_color=(0, 0, 0), final_color=(0, 0, 255), node_size=20, node_space=50, margin_size=50,
level_height=200):
"""
绘制树所包含的节点,没有连线。
空白圆圈表示没有节点,黑色圆圈表示有下一级节点的节点,红色圆圈表示无下一级节点的节点
:param tree: 需要画的树
:param node_color: 非最终一级节点颜色,默认黑色
:param final_color: 最终一级节点颜色,默认红色
:param node_size: 节点大小,默认20
:param node_space: 节点所占空间,默认50
:param margin_size: 边缘大小,默认50
:param level_height: 每一级高度,默认200
:param showNone: 是否绘制空节点,默认绘制
:return: 影像
"""
counter = 0
real_elmt_nums = []
for i in range(len(tree)):
for j in range(tree[i].__len__()):
if tree[i][j] is not None:
counter += 1
real_elmt_nums.append(counter)
counter = 0
max_elmt_num = max(real_elmt_nums)
height = (tree.__len__() - 1) * level_height + margin_size * 2
width = node_space * (max_elmt_num - 1) + margin_size * 2
max_draw_width = width - margin_size * 2
center_w = width / 2
blank_img = np.zeros([height, width, 3], np.uint8) + 255
for level in range(len(tree)):
if real_elmt_nums[level] == 1:
cv2.circle(blank_img,
(center_w, margin_size + level_height * level),
node_size,
color=final_color,
thickness=-1,
lineType=cv2.LINE_AA)
else:
block_width = int((real_elmt_nums[level] * 1.0 / max_elmt_num) * max_draw_width)
start_x = center_w - block_width / 2
node_counter = 0
step_length = block_width / (real_elmt_nums[level] - 1)
for node in range(len(tree[level])):
if tree[level][node] is not None:
if tree[level][node] == 1:
cv2.circle(blank_img,
(start_x + step_length * node_counter, margin_size + level_height * level),
node_size,
color=node_color,
thickness=-1,
lineType=cv2.LINE_AA)
else:
cv2.circle(blank_img,
(start_x + step_length * node_counter, margin_size + level_height * level),
node_size,
color=final_color,
thickness=-1,
lineType=cv2.LINE_AA)
node_counter += 1
return blank_img
def drawPathOnNodes(blank_img, tree, quadCode, line_color=(128, 128, 128), line_width=2, node_space=50,
margin_size=50, level_height=200):
"""
在已经绘制好的节点图上绘制连接线
:param blank_img: 已经绘制好的节点图
:param tree: 待绘制的树
:param quadCode: 四叉树编码
:param line_color: 连接线颜色,默认为灰色
:param line_width: 连接线宽度,默认为2
:param node_space: 节点空间大小,默认为50
:param margin_size: 边缘大小,默认为50
:param level_height: 每一层的高度,默认为200
:return: 影像
"""
height = (tree.__len__() - 1) * level_height + margin_size * 2
width = node_space * (tree[-1].__len__() - 1) + margin_size * 2
center_h = width / 2
path = getNodeSearchPath(quadCode)
points = []
depth = getDepthByLength(len(quadCode))
for level in range(depth):
for node in range(len(tree[level])):
start_x = center_h - (len(tree[level]) - 1) * (len(tree) - level) * node_space / 2
if node == path[level] - 1:
points.append((start_x + (len(tree) - level) * node_space * node, margin_size + level_height * level))
else:
if level == 0:
points.append(
(start_x + (len(tree) - level) * node_space * node, margin_size + level_height * level))
for i in range(len(points) - 1):
cv2.line(blank_img, points[i], points[i + 1], color=line_color, lineType=cv2.LINE_AA, thickness=line_width)
return blank_img
def drawPathOnNodes2(blank_img, tree, quadCode, line_color=(128, 128, 128), line_width=2, node_space=50,
margin_size=50, level_height=200):
"""
在已经绘制好的节点图上绘制连接线
:param blank_img: 已经绘制好的节点图
:param tree: 待绘制的树
:param quadCode: 四叉树编码
:param line_color: 连接线颜色,默认为灰色
:param line_width: 连接线宽度,默认为2
:param node_space: 节点空间大小,默认为50
:param margin_size: 边缘大小,默认为50
:param level_height: 每一层的高度,默认为200
:return: 影像
"""
counter = 0
real_elmt_nums = []
for i in range(len(tree)):
for j in range(tree[i].__len__()):
if tree[i][j] is not None:
counter += 1
real_elmt_nums.append(counter)
counter = 0
max_elmt_num = max(real_elmt_nums)
height = (tree.__len__() - 1) * level_height + margin_size * 2
width = node_space * (max_elmt_num - 1) + margin_size * 2
max_draw_width = width - margin_size * 2
center_w = width / 2
path = getNodeSearchPath(quadCode)
points = []
depth = getDepthByLength(len(quadCode))
for level in range(depth):
if real_elmt_nums[level] == 1:
points.append((center_w, margin_size + level_height * level))
else:
block_width = int((real_elmt_nums[level] * 1.0 / max_elmt_num) * max_draw_width)
start_x = center_w - block_width / 2
node_counter = 0
step_length = block_width / (real_elmt_nums[level] - 1)
for node in range(len(tree[level])):
if tree[level][node] is not None:
if node == path[level] - 1:
points.append((start_x + step_length * node_counter, margin_size + level_height * level))
node_counter += 1
for i in range(len(points) - 1):
cv2.line(blank_img, points[i], points[i + 1], color=line_color, lineType=cv2.LINE_AA, thickness=line_width)
return blank_img
def drawTree(tree, nodes, showNone=False):
"""
绘制带有节点与连接线的树结构
:param tree: 待绘制的树
:param nodes: 节点列表
:param showNone: 是否绘制空节点,默认不绘制
:return: 绘制好的影像
"""
tree_img = drawNodes(tree, showNone=showNone)
for i in range(len(nodes)):
tree_img = drawPathOnNodes(tree_img, tree, nodes[i][0])
return tree_img
def drawTree2(tree, nodes):
"""
绘制带有节点与连接线的树结构
:param tree: 待绘制的树
:param nodes: 节点列表
:param showNone: 是否绘制空节点,默认不绘制
:return: 绘制好的影像
"""
tree_img = drawNodes2(tree)
for i in range(len(nodes)):
tree_img = drawPathOnNodes2(tree_img, tree, nodes[i][0])
return tree_img
def buildFullQuad(maxDepth):
"""
依据最大深度建立完全四叉树
:param maxDepth: 最大深度
:return: 完全四叉树
"""
tree = []
for i in range(maxDepth):
tree.append([None] * LEVEL_NUM[i])
return tree
def getDepthByLength(code_length):
"""
根据四叉树编码字符串长度获取其深度
:param code_length: 四叉树编码字符串长度
:return: 深度
"""
if code_length == 1:
return 1
elif code_length == 2:
return 2
elif code_length == 4:
return 3
elif code_length == 6:
return 4
elif code_length == 9:
return 5
elif code_length == 13:
return 6
elif code_length == 17:
return 7
elif code_length == 22:
return 8
elif code_length == 27:
return 9
elif code_length == 33:
return 10
elif code_length == 40:
return 11
elif code_length == 47:
return 12
elif code_length == 55:
return 13
else:
return -1
def getNodeSearchPath(quadCode):
"""
依据四叉树编码获得其在每一层中的索引位置
:param quadCode: 四叉树编码字符串
:return: 包含每一层索引位置的list
"""
length = len(quadCode)
depth = getDepthByLength(length)
search_path = []
for i in range(depth):
search_path.append(int(quadCode[INDEX_TABLE[i]:INDEX_TABLE[i + 1]]))
return search_path
def insertNode(tree, quadCode, value=0):
"""
向树中插入节点,以及节点内容
:param tree: 待插入节点的树
:param quadCode: 四叉树编码
:param value: 节点值
:return: 插入节点后的四叉树
"""
path = getNodeSearchPath(quadCode)
depth = getDepthByLength(len(quadCode))
for i in range(len(path)):
tree[i][path[i] - 1] = 1
tree[depth - 1][path[-1] - 1] = value
return tree
def saveNodes(nodes, save_path="nodes.txt"):
"""
保存四叉树数据结构,默认保存名称为nodes.txt
:param nodes: 待保存的四叉树
:param save_path: 保存文件的名称
:return: 无
"""
f = open(save_path, 'w')
max_depth = 0
for i in range(nodes.__len__()):
depth = getDepthByLength(len(nodes[i][0]))
if depth > max_depth:
max_depth = depth
f.write(max_depth.__str__() + "\n")
for i in range(nodes.__len__()):
f.write(nodes[i][0] + "\t" + nodes[i][1].__str__() + "\n")
f.close()
def readNodes(node_path):
"""
读取四叉树文件内容
:param node_path: 四叉树文件路径
:return: 读取到的四叉树数据结构以及存储的内容
"""
f = open(node_path, 'r')
max_depth = int(f.readline())
nodes = []
line = f.readline()
while line:
code = line.split("\t")[0]
value = line.split("\t")[1]
nodes.append((code, float(value)))
line = f.readline()
return nodes, max_depth
def cvtPosListToFullQuadCodeList(pos_list):
"""
将真实四叉树位置list转为四叉树编码list
:param pos_list: 真实四叉树位置list
:return: 四叉树编码list
"""
depth = len(pos_list)
code = []
for i in range(depth):
if i == 0:
code.append(pos_list[0])
else:
code.append((code[i - 1] - 1) * 4 + pos_list[i])
return code
def cvtPosListToFullQuadCodeStr(pos_list):
"""
将真实四叉树位置list转为四叉树编码str
:param pos_list: 真实四叉树位置list
:return: 四叉树编码str
"""
code_str = ""
code = cvtPosListToFullQuadCodeList(pos_list)
for i in range(len(code)):
code_str += code[i].__str__().zfill(LEVEL_LENGTH[i])
return code_str
def cvtPosStrToFullQuadCodeList(pos_str):
"""
将真实四叉树位置str转为四叉树编码list
:param pos_str: 真实四叉树位置str
:return: 四叉树编码list
"""
path = getNodeSearchPath(pos_str)
code_list = cvtPosListToFullQuadCodeList(path)
return code_list
def cvtPosStrToFullQuadCodeStr(pos_str):
"""
将真实四叉树位置str转为四叉树编码str
:param pos_str: 真实四叉树位置str
:return: 四叉树编码str
"""
code_str = ""
code = cvtPosStrToFullQuadCodeList(pos_str)
for i in range(len(code)):
code_str += code[i].__str__().zfill(LEVEL_LENGTH[i])
return code_str
def cvtQuadCodeStrToPosList(code_str):
"""
将四叉树编码str转为真实四叉树位置list
:param code_str: 四叉树编码str
:return: 真实四叉树位置list
"""
paths = getNodeSearchPath(code_str)
depth = len(paths)
pos = []
for i in range(depth - 1, -1, -1):
if i - 1 < 0:
pos.append(paths[0])
else:
pos.append(paths[i] - (paths[i - 1] - 1) * 4)
pos.reverse()
return pos
def cvtQuadCodeListToPosList(code_list):
"""
将四叉树编码list转为真实四叉树位置list
:param code_list: 四叉树编码list
:return: 真实四叉树位置list
"""
depth = len(code_list)
pos = []
for i in range(depth - 1, -1, -1):
if i - 1 < 0:
pos.append(code_list[0])
else:
pos.append(code_list[i] - (code_list[i - 1] - 1) * 4)
pos.reverse()
return pos
def cvtQuadCodeStrToPosStr(code_str):
"""
将四叉树编码str转为真实四叉树位置str
:param code_str: 四叉树编码str
:return: 真实四叉树位置str
"""
pos_list = cvtQuadCodeStrToPosList(code_str)
pos_str = ""
for i in range(len(pos_list)):
pos_str += pos_list[i].__str__().zfill(LEVEL_LENGTH[i])
return pos_str
def cvtQuadCodeListToPosStr(code_list):
"""
将四叉树编码list转为真实四叉树位置str
:param code_list: 四叉树编码list
:return: 真实四叉树位置str
"""
pos_list = cvtQuadCodeListToPosList(code_list)
depth = len(pos_list)
pos_str = ""
for i in range(depth):
pos_str += pos_list[i].__str__().zfill(INDEX_TABLE[i])
return pos_str
if __name__ == '__main__':
# step 1 :建立节点列表用于存放待插入树的节点
nodes = []
# 第一层根节点
nodes.append((cvtPosListToFullQuadCodeStr([1]), 200))
# 第二层
nodes.append((cvtPosListToFullQuadCodeStr([1, 1]), 100))
nodes.append((cvtPosListToFullQuadCodeStr([1, 2]), 100))
nodes.append((cvtPosListToFullQuadCodeStr([1, 3]), 100))
nodes.append((cvtPosListToFullQuadCodeStr([1, 4]), 100))
# 第三层第一部分
nodes.append((cvtPosListToFullQuadCodeStr([1, 1, 1]), 100))
nodes.append((cvtPosListToFullQuadCodeStr([1, 1, 2]), 100))
nodes.append((cvtPosListToFullQuadCodeStr([1, 1, 3]), 100))
nodes.append((cvtPosListToFullQuadCodeStr([1, 1, 4]), 100))
# 第三层第二部分
nodes.append((cvtPosListToFullQuadCodeStr([1, 3, 1]), 100))
nodes.append((cvtPosListToFullQuadCodeStr([1, 3, 2]), 100))
nodes.append((cvtPosListToFullQuadCodeStr([1, 3, 3]), 100))
nodes.append((cvtPosListToFullQuadCodeStr([1, 3, 4]), 100))
# 第四层第一部分
nodes.append((cvtPosListToFullQuadCodeStr([1, 3, 4, 1]), 100))
nodes.append((cvtPosListToFullQuadCodeStr([1, 3, 4, 2]), 100))
nodes.append((cvtPosListToFullQuadCodeStr([1, 3, 4, 3]), 100))
nodes.append((cvtPosListToFullQuadCodeStr([1, 3, 4, 4]), 100))
# 第四层第二部分
nodes.append((cvtPosListToFullQuadCodeStr([1, 2, 1, 1]), 100))
nodes.append((cvtPosListToFullQuadCodeStr([1, 2, 1, 2]), 100))
nodes.append((cvtPosListToFullQuadCodeStr([1, 2, 1, 3]), 100))
nodes.append((cvtPosListToFullQuadCodeStr([1, 2, 1, 4]), 100))
# 第五层第一部分
nodes.append((cvtPosListToFullQuadCodeStr([1, 2, 1, 2, 1]), 100))
nodes.append((cvtPosListToFullQuadCodeStr([1, 2, 1, 2, 2]), 100))
nodes.append((cvtPosListToFullQuadCodeStr([1, 2, 1, 2, 3]), 100))
nodes.append((cvtPosListToFullQuadCodeStr([1, 2, 1, 2, 4]), 100))
# 第六层
nodes.append((cvtPosListToFullQuadCodeStr([1, 2, 1, 2, 3, 1]), 100))
nodes.append((cvtPosListToFullQuadCodeStr([1, 2, 1, 2, 3, 2]), 100))
nodes.append((cvtPosListToFullQuadCodeStr([1, 2, 1, 2, 3, 3]), 100))
nodes.append((cvtPosListToFullQuadCodeStr([1, 2, 1, 2, 3, 4]), 100))
# 第七层
nodes.append((cvtPosListToFullQuadCodeStr([1, 2, 1, 2, 3, 4, 1]), 100))
nodes.append((cvtPosListToFullQuadCodeStr([1, 2, 1, 2, 3, 4, 2]), 100))
nodes.append((cvtPosListToFullQuadCodeStr([1, 2, 1, 2, 3, 4, 3]), 100))
nodes.append((cvtPosListToFullQuadCodeStr([1, 2, 1, 2, 3, 4, 4]), 100))
# 第八层第一部分
nodes.append((cvtPosListToFullQuadCodeStr([1, 2, 1, 2, 3, 4, 2, 1]), 100))
nodes.append((cvtPosListToFullQuadCodeStr([1, 2, 1, 2, 3, 4, 2, 2]), 100))
nodes.append((cvtPosListToFullQuadCodeStr([1, 2, 1, 2, 3, 4, 2, 3]), 100))
nodes.append((cvtPosListToFullQuadCodeStr([1, 2, 1, 2, 3, 4, 2, 4]), 100))
# 第八层第二部分
nodes.append((cvtPosListToFullQuadCodeStr([1, 2, 1, 2, 3, 4, 1, 1]), 100))
nodes.append((cvtPosListToFullQuadCodeStr([1, 2, 1, 2, 3, 4, 1, 2]), 100))
nodes.append((cvtPosListToFullQuadCodeStr([1, 2, 1, 2, 3, 4, 1, 3]), 100))
nodes.append((cvtPosListToFullQuadCodeStr([1, 2, 1, 2, 3, 4, 1, 4]), 100))
# 第九层
nodes.append((cvtPosListToFullQuadCodeStr([1, 2, 1, 2, 3, 4, 1, 3, 1]), 100))
nodes.append((cvtPosListToFullQuadCodeStr([1, 2, 1, 2, 3, 4, 1, 3, 2]), 100))
nodes.append((cvtPosListToFullQuadCodeStr([1, 2, 1, 2, 3, 4, 1, 3, 3]), 100))
nodes.append((cvtPosListToFullQuadCodeStr([1, 2, 1, 2, 3, 4, 1, 3, 4]), 100))
# 第十层
nodes.append((cvtPosListToFullQuadCodeStr([1, 2, 1, 2, 3, 4, 1, 3, 3, 1]), 100))
nodes.append((cvtPosListToFullQuadCodeStr([1, 2, 1, 2, 3, 4, 1, 3, 3, 2]), 100))
nodes.append((cvtPosListToFullQuadCodeStr([1, 2, 1, 2, 3, 4, 1, 3, 3, 3]), 100))
nodes.append((cvtPosListToFullQuadCodeStr([1, 2, 1, 2, 3, 4, 1, 3, 3, 4]), 100))
# 第十一层第一部分
nodes.append((cvtPosListToFullQuadCodeStr([1, 2, 1, 2, 3, 4, 1, 3, 3, 1, 1]), 100))
nodes.append((cvtPosListToFullQuadCodeStr([1, 2, 1, 2, 3, 4, 1, 3, 3, 1, 2]), 100))
nodes.append((cvtPosListToFullQuadCodeStr([1, 2, 1, 2, 3, 4, 1, 3, 3, 1, 3]), 100))
nodes.append((cvtPosListToFullQuadCodeStr([1, 2, 1, 2, 3, 4, 1, 3, 3, 1, 4]), 100))
# 第十一层第二部分
nodes.append((cvtPosListToFullQuadCodeStr([1, 2, 1, 2, 3, 4, 1, 3, 3, 4, 1]), 100))
nodes.append((cvtPosListToFullQuadCodeStr([1, 2, 1, 2, 3, 4, 1, 3, 3, 4, 2]), 100))
nodes.append((cvtPosListToFullQuadCodeStr([1, 2, 1, 2, 3, 4, 1, 3, 3, 4, 3]), 100))
nodes.append((cvtPosListToFullQuadCodeStr([1, 2, 1, 2, 3, 4, 1, 3, 3, 4, 4]), 100))
# 第十二层
nodes.append((cvtPosListToFullQuadCodeStr([1, 2, 1, 2, 3, 4, 1, 3, 3, 4, 2, 1]), 100))
nodes.append((cvtPosListToFullQuadCodeStr([1, 2, 1, 2, 3, 4, 1, 3, 3, 4, 2, 2]), 100))
nodes.append((cvtPosListToFullQuadCodeStr([1, 2, 1, 2, 3, 4, 1, 3, 3, 4, 2, 3]), 100))
nodes.append((cvtPosListToFullQuadCodeStr([1, 2, 1, 2, 3, 4, 1, 3, 3, 4, 2, 4]), 100))
# step 2:将节点列表中的节点保存为文件
saveNodes(nodes, "nodes.tree")
# step 3:读取节点文件中的数据结构及数据
nodes, max_depth = readNodes("nodes.tree")
# step 4:根据读取的数据恢复四叉树结构(无效节点为None),并将节点依次插入
tree = buildFullQuad(max_depth)
for i in range(len(nodes)):
tree = insertNode(tree, nodes[i][0], nodes[i][1])
# step 5:绘制恢复的四叉树结构并保存
img_tree = drawTree2(tree, nodes)
cv2.imwrite("quadtree.png", img_tree)
将代码和测试数据上传到了Github,叫做SaveAndReadQuadTree,点击查看。
3.代码测试
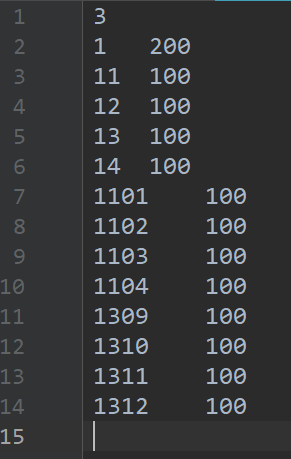
利用上述代码首先向树中插入了很多个节点,然后将其保存。然后建了一个空完全四叉树用于恢复结构。保存的四叉树文件内容如下:
 利用其恢复出的结构如下所示。
利用其恢复出的结构如下所示。
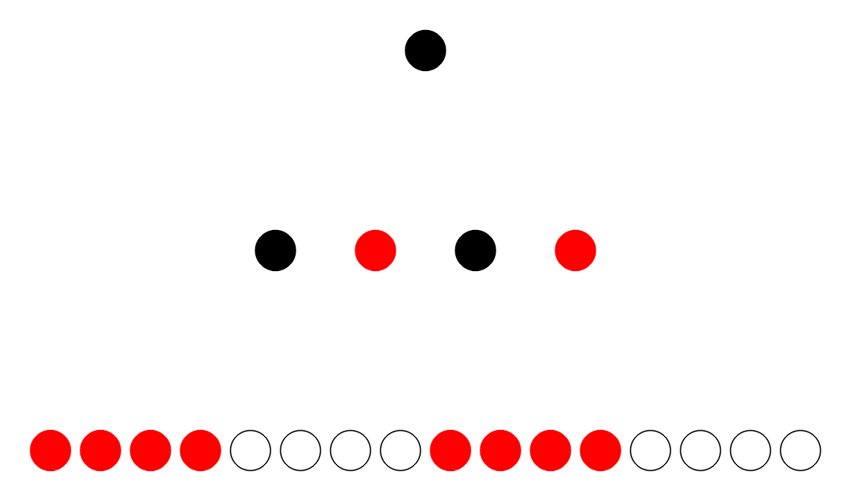 其中空心圆圈表示非节点,这里只是为了展示。红色节点表示最终没有子节点的节点,黑色节点表示含有子节点的节点。将所有连接路径画出如下图。
其中空心圆圈表示非节点,这里只是为了展示。红色节点表示最终没有子节点的节点,黑色节点表示含有子节点的节点。将所有连接路径画出如下图。
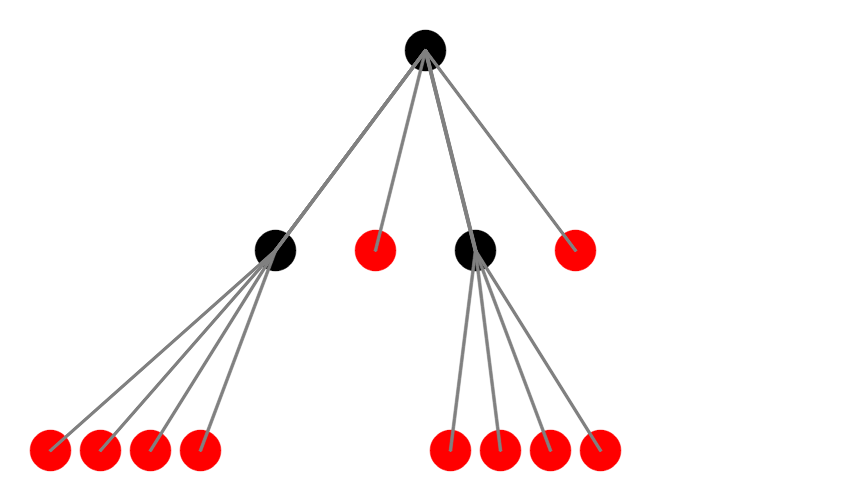 可以发现基本与之前添加的一样,达到了要求。最后,利用上面的代码存储、恢复并绘制了一个12层的四叉树(包含根节点),如下。
可以发现基本与之前添加的一样,达到了要求。最后,利用上面的代码存储、恢复并绘制了一个12层的四叉树(包含根节点),如下。
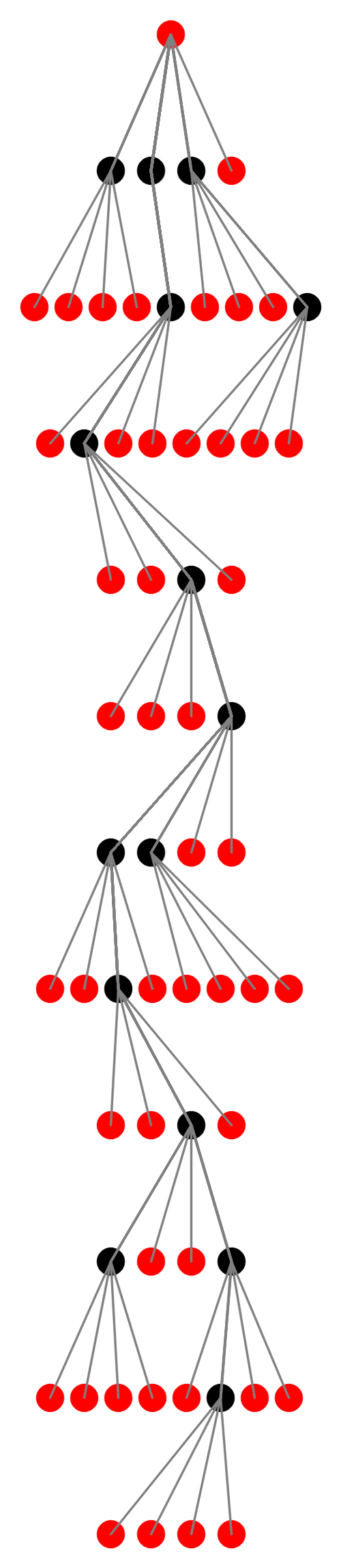 第12层节点共计4194304个,若一个节点对应一个像素,图像的大小大约为4096*1024,比正常许多图片要大了,可以满足需求。
第12层节点共计4194304个,若一个节点对应一个像素,图像的大小大约为4096*1024,比正常许多图片要大了,可以满足需求。
本文作者原创,未经许可不得转载,谢谢配合
