上一篇笔记介绍了Eigen中矩阵相关的基本操作,这次介绍与学习Eigen中与线代有关的模块与函数,具体为求解线性方程组和矩阵分解两块。
1.求解线性方程组
线代中形如Ax=b的线性方程组是最简单的入门示例。对于常规适定的线性方程组(未知数个数=方程个数),可以采用常规的矩阵分解法求解。在Eigen中有多种解法可供选择,以满足在精度与效率上不同的需求。有如下方程组:
解方程组的示例代码如下:
# include<iostream>
# include<Eigen\Dense>
using namespace std;
using namespace Eigen;
int main(){
Matrix3f A;
Vector3f b;
A << 1, 2, 3, 4, 5, 6, 7, 8, 10;
b << 3, 3, 4;
Vector3f x;
x = A.colPivHouseholderQr().solve(b);
cout << x << endl;
system("pause");
return 0;
}
上述代码调用了.colPivHouseholderQr()函数对方程进行求解。Eigen中所有不同方法调用都有固定的格式:x = A.methodName().solve(b),如下是Eigen中一些常用方法的比较,根据需要选择不同方法。
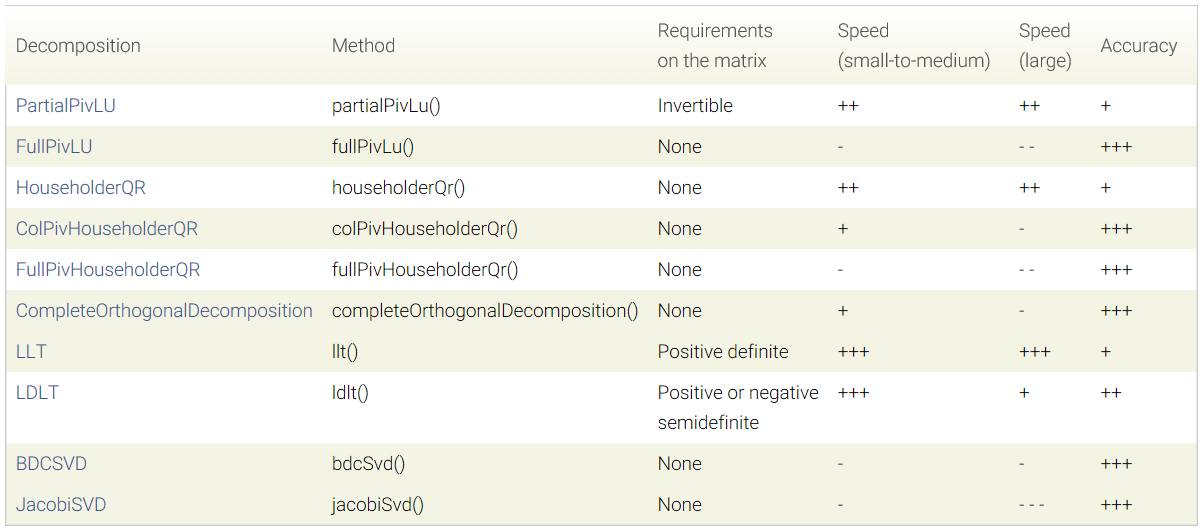 其中Eigen的LLT对应Cholesky分解方法。当然,Eigen还可以解一些长的比较“奇怪”的方程组(如x、b并不是向量而是矩阵),如下方程组:
其中Eigen的LLT对应Cholesky分解方法。当然,Eigen还可以解一些长的比较“奇怪”的方程组(如x、b并不是向量而是矩阵),如下方程组:
求解代码如下:
# include<iostream>
# include<Eigen\Dense>
using namespace std;
using namespace Eigen;
int main(){
Matrix2f A, b;
A << 2, -1, -1, 3;
b << 1, 2, 3, 1;
Matrix2f x = A.ldlt().solve(b);
cout << x << endl;
system("pause");
return 0;
}
如果对上面方程组展开重新合并,就变成如下常规的Ax=b形式了,可以看出依然是适定方程组。
2.计算特征值与特征向量
Eigen中计算特征值与特征向量非常简单,构造一个EigenSolver,然后分别调用其成员函数.eigenvalues()、.eigenvectors()即可获得特征值与特征向量。在Eigen中提供了多种Solver,可查阅文档。直接看代码:
# include<iostream>
# include<Eigen\Dense>
using namespace std;
using namespace Eigen;
int main(){
Matrix2f A;
A << 1, 2, 2, 3;
EigenSolver<Matrix2f> eigensolver(A);
if (eigensolver.info() == Success){
cout << eigensolver.eigenvalues() << endl;
cout << eigensolver.eigenvectors() << endl;
}
else{
cout << "error while solving...";
}
system("pause");
return 0;
}
在上面的代码中通过.info()函数查询了求解状态,如果成功继续,否则输出错误。
3.线性方程组的最小二乘解
前面说了,如果一个线性方程组是适定的(未知数个数=方程个数),采用常规的矩阵分解方法即可得到解。对正定方程组采用最小二乘法和矩阵分解法得到的结果相同。而如果一个线性方程组是超定的(overdeterminated,未知数个数>方程数),这时候常规方法无解,就需要用最小二乘拟合最优结果。
(1)SVD方法
求解最小二乘最精确的解法文档中说是SVD分解。Eigen中提供了多种解法,官方推荐的是BDCSVD方法。下面直接看SVD方法使用示例,有如下超定方程组:
最小二乘求解代码如下:
# include<iostream>
# include<Eigen\Dense>
using namespace std;
using namespace Eigen;
int main(){
MatrixXf A(3, 2);
Vector3f b;
Vector2f x;
A << 1, 2, 5, -3, 7, 10;
b << 3, 7, 1;
x = A.bdcSvd(ComputeThinU | ComputeThinV).solve(b);
cout << x << endl;
system("pause");
return 0;
}
可以得到解为:
\[\left\{\begin{matrix} x_{1}=1.02755\\ x_{2}=-0.56257 \end{matrix}\right.\]这样得到的x就是通过最小二乘算出来的。这里.bcdScd()函数里面的参数ComputeThinU | ComputeThinV必须要写(可以先记住),否则会报错,关于参数的解释放在矩阵分解部分介绍,这里不多说。
如果你比较细心,将得到的解带回方程会发现其并不是严格成立的,有时可能还会相差较大。这是因为对于超定方程,采用最小二乘法得出的解并不一定对每一个方程都严格成立,其确保的是当前解在所有方程上的总误差最小。得到解以后我们可以反算出其解的整体精度,像这样:
# include<iostream>
# include<Eigen\Dense>
using namespace std;
using namespace Eigen;
int main(){
MatrixXf A(3, 2);
Vector3f b;
Vector2f x;
Vector3f error;
double mean_error;
A << 1, 2, 5, -3, 7, 10;
b << 3, 7, 1;
x = A.bdcSvd(ComputeThinU | ComputeThinV).solve(b);
cout << x << endl << endl;
error = (A*x - b).cwiseAbs();
mean_error = error.mean();
cout << error << endl << endl;
cout << mean_error << endl;
system("pause");
return 0;
}
输出结果如下:
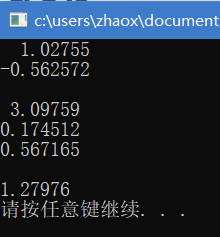
可以看到第一个方程误差较大,后面两个还行,平均误差1点几。当然这并不是说最小二乘不行,因为这个方程组是我自己随便造的,所以拟合误差不会小,真实数据会好很多。
除了SVD方法,QR分解方法、正规方程法(normal equation)等,下面逐一演示用法。
(2)QR方法
QR分解方法:
# include<iostream>
# include<Eigen\Dense>
using namespace std;
using namespace Eigen;
int main(){
MatrixXf A(3, 2);
Vector3f b;
Vector2f x;
A << 1, 2, 5, -3, 7, 10;
b << 3, 7, 1;
x = A.colPivHouseholderQr().solve(b);
cout << x << endl << endl;
system("pause");
return 0;
}
(3)正规方程法
正规方程法。所谓正规方程法思想是若要求解Ax=b,等价于方程两边同乘A的转置:ATAx=ATb,这样系数矩阵可化为方阵。代码如下:
# include<iostream>
# include<Eigen\Dense>
using namespace std;
using namespace Eigen;
int main(){
MatrixXf A(3, 2);
Vector3f b;
Vector2f x;
A << 1, 2, 5, -3, 7, 10;
b << 3, 7, 1;
x = (A.transpose()*A).ldlt().solve(A.transpose()*b);
cout << x << endl << endl;
system("pause");
return 0;
}
需要注意的是如果系数矩阵A本身是病态的,采用正规方程法不是一个很好的选择。所谓病态矩阵是指矩阵A的行列式乘以A逆的行列式的结果,记为K,若这个值很大即为病态。
以上主要介绍了SVD、QR、正规方程三种方法求解线性最小二乘问题。其中SVD精度最高、速度最慢,正规方程法精度最低、速度最快,QR方法则介于二者之间。
4.矩阵分解
官方文档中关于矩阵分解的方法对比见这里,这里也简单贴一下。
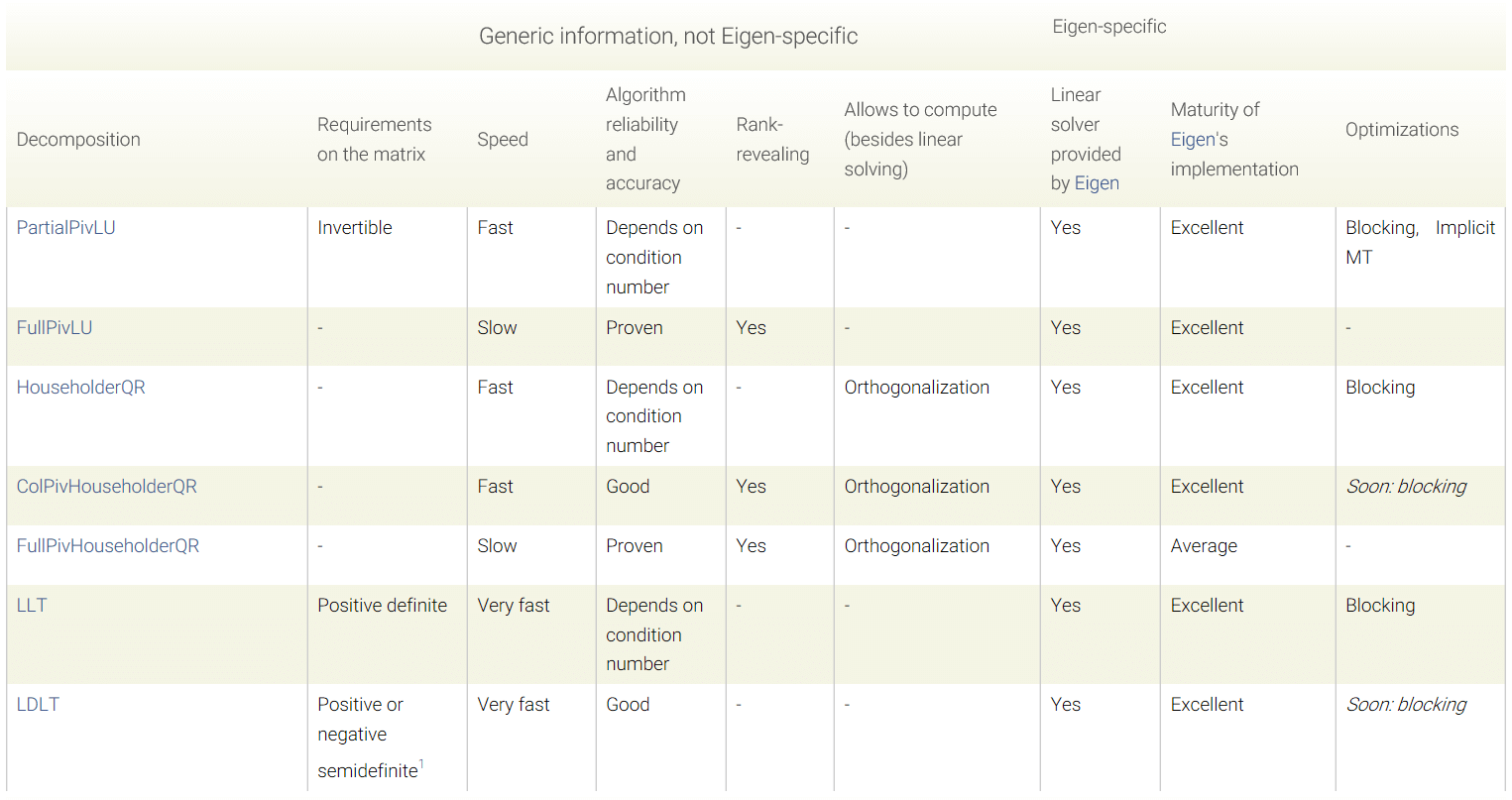
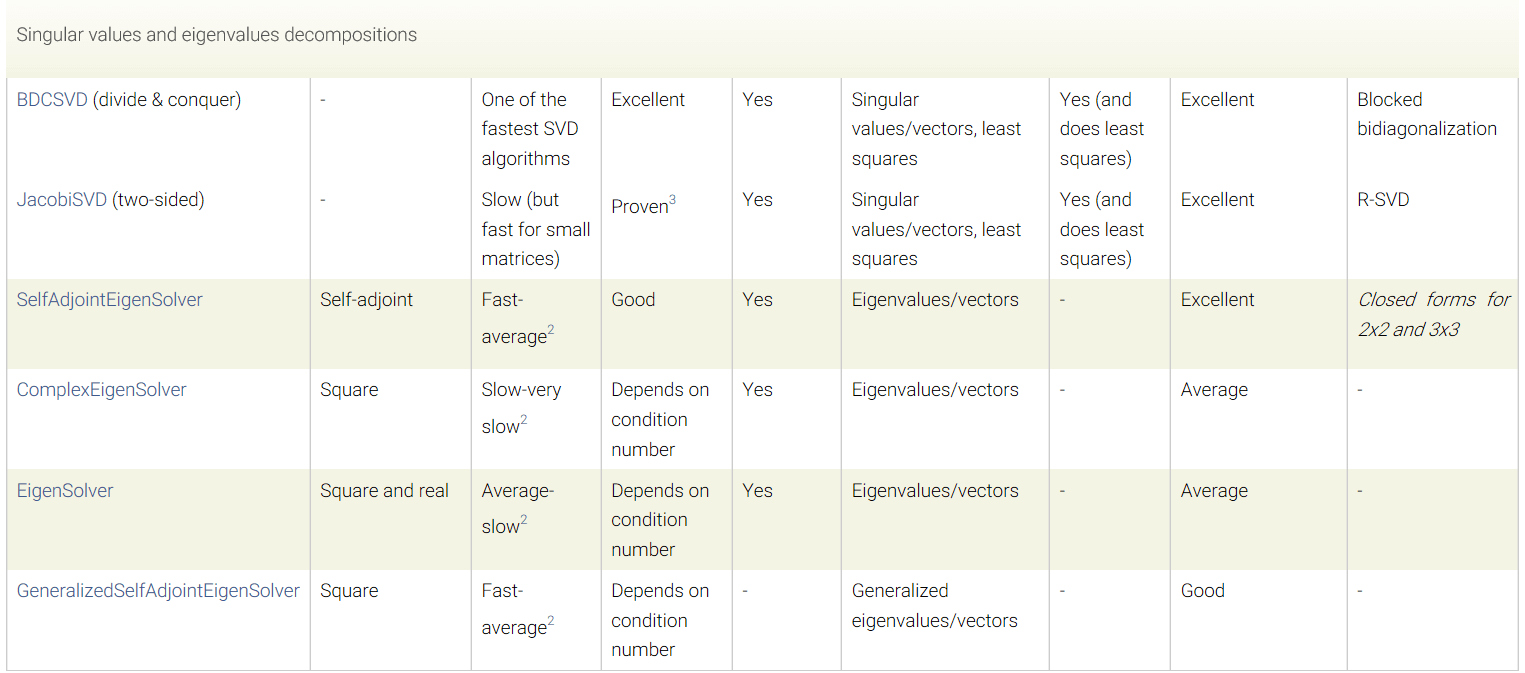
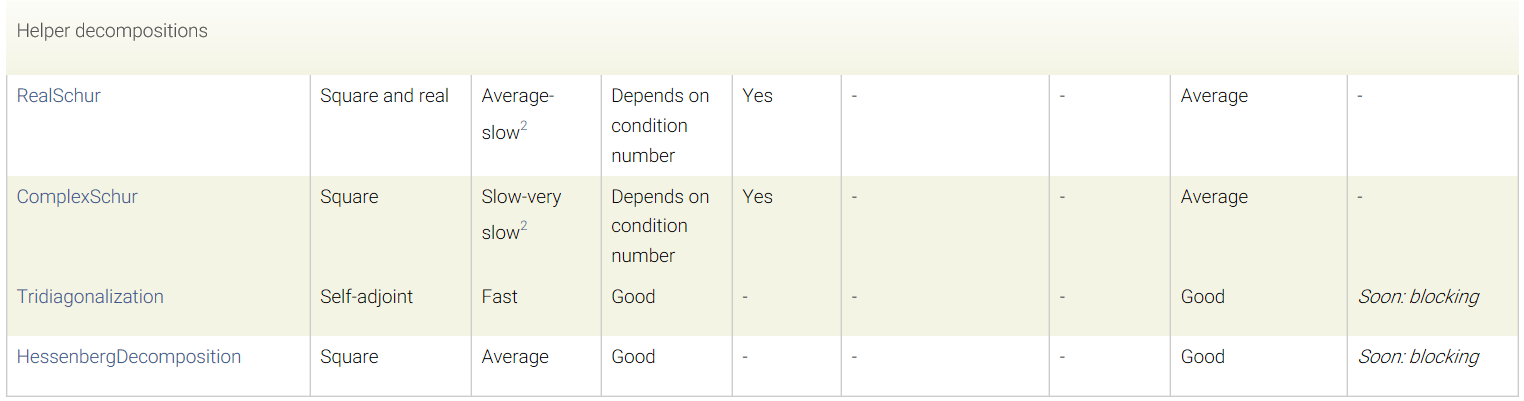
这里简单补充一下常见矩阵分解的定义与算法。
(1)LU三角分解
三角分解法是仅对方阵有效,将原方阵分解成一个上三角形矩阵或是排列(permuted)的上三角形矩阵和一个下三角形矩阵,这样的分解法又称为LU分解法。它的用途主要在简化一个大矩阵的行列式值的计算过程、求反矩阵和求解联立方程组。不过要注意这种分解法所得到的上下三角形矩阵并非唯一,还可找到数个不同的一对上下三角形矩阵,此两三角形矩阵相乘也会得到原矩阵。[L,U]=lu(A)
(2)QR分解
QR分解法对象不一定是方阵,其将矩阵分解成一个正规正交矩阵与上三角形矩阵,所以称为QR分解法,与此正规正交矩阵的通用符号Q有关。[Q,R]=qr(A)
(3)SVD分解
奇异值分解(singular value decomposition,SVD)是另一种正交矩阵分解法;SVD是最可靠的分解法,但是它比QR分解法要花上近十倍的计算时间。[U,S,V]=svd(A),其中U和V分别代表两个正交矩阵,而S代表一对角矩阵。和QR分解法相同,原矩阵A不必为方阵。使用SVD分解法的用途是解最小平方误差法和数据压缩。
(4)LLT分解
又称Cholesky分解,其把一个对称正定的矩阵表示成一个下三角矩阵L和其转置的乘积的分解。它要求矩阵为方阵,且所有特征值必须大于零,故分解的下三角的对角元也是大于零的(LU三角分解法的变形)。A=LL^T
(5)LDLT分解
LDLT分解法实际上是Cholesky分解法的改进,因为Cholesky分解法虽然不需要选主元,但其运算过程中涉及到开方问题,而LDLT分解法则避免了这一问题,可用于求解线性方程组。
也需要分解对象为方阵,分解结果为A=LDL^T。其中L为一下三角形单位矩阵(即主对角线元素皆为1),D为一对角矩阵(只在主对角线上有元素,其余皆为零),L^T为L的转置矩阵。
参考资料
- [1]http://eigen.tuxfamily.org/dox/group__TutorialLinearAlgebra.html
- [2]http://eigen.tuxfamily.org/dox/group__TopicLinearAlgebraDecompositions.html
- [3]http://eigen.tuxfamily.org/dox/group__LeastSquares.html
- [4]https://www.yuanmas.com/info/8VaPowvBzr.html
本文作者原创,未经许可不得转载,谢谢配合
