本篇博客主要记录Eigen的几何模块,处理2D、3D旋转、射影以及仿射等变换。使用几何模块需要导入头文件<Eigen\Geometry>。
1.模块简介
几何模块提供两种不同的几何变换:
-
抽象变换(Abstract transformation):旋转(Rotation)(角轴或四元素表示)、平移(Translation)、缩放(Scaling)。这些变换在Eigen中不是以矩阵形式表示,但它们可以与矩阵混合运算。
-
射影或仿射变换(Projective or Affine transformation):它们在Eigen中是用真正的矩阵表示。
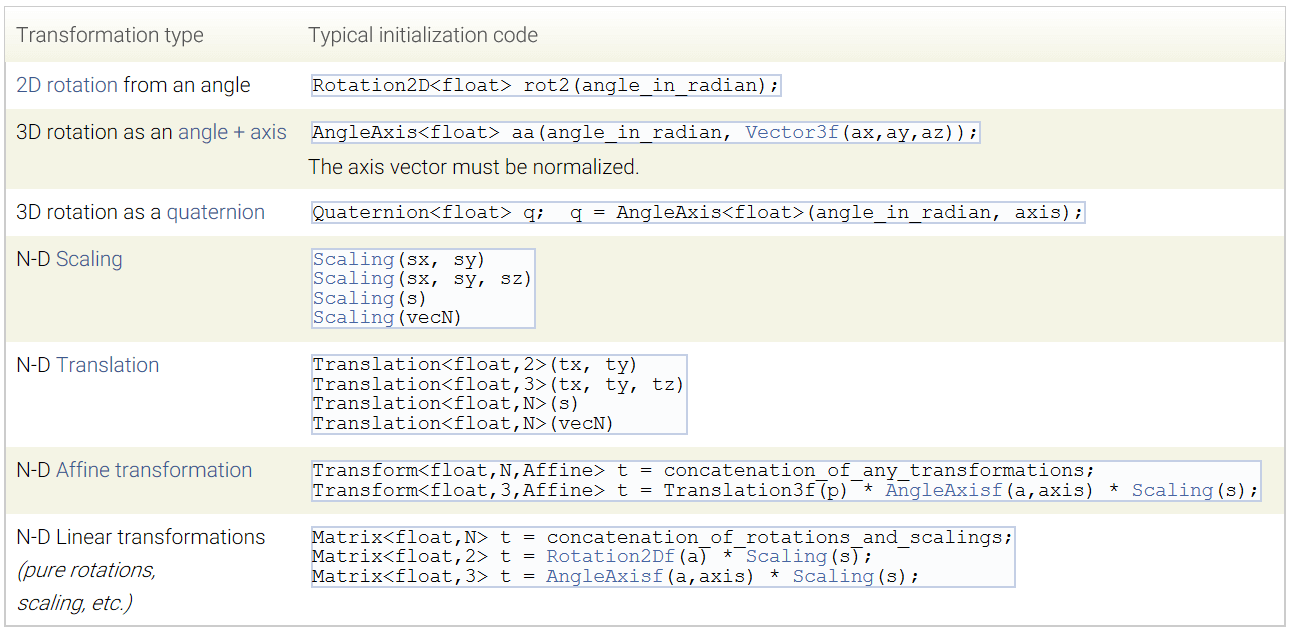
以下是Eigen中不同变换所对应的数据类型:
 下面分别进行详细介绍。
下面分别进行详细介绍。
2.旋转
如上图所示,在Eigen中有多种方式可以表达旋转,如旋转角(2D)、角轴(3D)、四元数(3D)、旋转矩阵(2D&3D)等,它们各有特色。总的来说,对于多个向量进行批量旋转推荐使用旋转矩阵(Matrix),这样操作起来更快捷。而其它情况下使用四元数(Quaternion)比较合适,因为它存储量小、快速、稳定。而像旋转角(Rotation2D)以及角轴(AngleAxis),在实际使用中更多是为了方便创建旋转对象(Rotation Objects)而产生的的中间类型。在构建时需要注意凡是角度都用弧度表示。
(1)2D旋转
对于2D旋转,Eigen中用Rotation2D类对应,其创建方式和Matrix类似,需要一个模板参数表示数据类型,构造函数需要传入一个弧度表示的旋转角度。旋转顺序是顺时针为正,逆时针为负。除了这种方法还有2种重载的构造函数,分别传入的是2×2的旋转矩阵和已有的Rotation2D对象。
此外也定义了Rotation2Dd和Rotation2Df对应于double和float数据类型,方便使用。另一个需要注意的一点是不要想当然地认为有Rotation2D就有Rotation3D类,这在Eigen中是没有的。
Rotation2D还提供了一些常用的成员函数方便使用,简单罗列如下:
-
.angle():返回弧度制表示的旋转角度 -
.cast():将当前对象转换为另一种类型的Rotation2D,如Rotation2Dd转到Rotation2Df。 -
.fromRotationMatrix():从一个2 × 2的旋转矩阵构建Rotation2D对象。换句话说,本函数可以提取旋转矩阵所表示的旋转角,像这样:.fromRotationMatrix(m).angle()即可返回弧度制表示的旋转角度。 -
.toRotationMatrix():将当前Rotation2D对象转换为2 × 2的旋转矩阵。 -
.isApprox():判断当前Rotation2D是否与给定Rotation2D近似相等,是的话返回true。判断精度由传入的第二个参数决定。 -
.inverse():返回以Rotation2D表示的当前旋转的逆旋转 -
.slerp():返回对起始Rotation2D和目标Rotation2D经过球面插值(spherical interpolation)得到的结果,在这里等于是线性插值,对于四元数不是。其结果范围与参数t有关。t=0时等于起始Rotation2D,t=1时等于目标Rotation2D,而t=n>1时,则等于n倍的目标Rotation2D。其使用注意事项在下面的代码中介绍。
下面是一些简单的使用示例。
#include <iostream>
#include <opencv2/opencv.hpp>
#include <Eigen/Dense>
#include <Eigen/Geometry>
using namespace std;
using namespace Eigen;
using namespace cv;
void drawRectangle(Mat &img, Point2i p1, Point2i p2, Point2i p3, Point2i p4, Scalar color, int thickness) {
line(img, p1, p2, color, thickness, LINE_AA);
line(img, p2, p3, color, thickness, LINE_AA);
line(img, p3, p4, color, thickness, LINE_AA);
line(img, p4, p1, color, thickness, LINE_AA);
}
Point2i cvtVector2Point(Vector2f vec) {
Point2i p(int(vec(0, 0)), int(vec(1, 0)));
return p;
}
int main() {
Point2i lp1(100, 100), lp2(300, 100), lp3(300, 300), lp4(100, 300);
Mat background = Mat(400, 800, CV_8UC3, Scalar(0, 0, 0));
Rotation2Df pose1(0);
Rotation2Df pose2(3.141592653);
Vector2f rp1(-100, -100), loc1;
Vector2f rp2(100, -100), loc2;
Vector2f rp3(100, 100), loc3;
Vector2f rp4(-100, 100), loc4;
Vector2f center(600, 200);
Matrix2f rot;
int steps = 100;
while (true) {
for (int i = 0; i < steps; ++i) {
float ratio = i * 1.0 / steps;
// 注意这里插值的规则。取的是逆时针或顺时针旋转角最小的那个方向。
// 例如如果让他内插0到270度,他会选择逆时针旋转90度而不是顺时针旋转270度。
// 因此如果这里直接设置终止为2pi,他会直接选择逆时针旋转0度,结果就是没有旋转。
// 所以插值的直接上下限不能超过180度,否则就可能和你预计的方向相反了。后面可以通过系数t则可以扩展上限,从而达到2pi。
// 例如0-60 t设为6,0-90 t设为4,0-180 t设为2,这些都是等价的,且可以旋转360度
rot = pose1.slerp(ratio * 2, pose2).toRotationMatrix();
loc1 = rot * rp1 + center;
loc2 = rot * rp2 + center;
loc3 = rot * rp3 + center;
loc4 = rot * rp4 + center;
drawRectangle(background, lp1, lp2, lp3, lp4, Scalar(0, 0, 255), 2);
drawRectangle(background,
cvtVector2Point(loc1),
cvtVector2Point(loc2),
cvtVector2Point(loc3),
cvtVector2Point(loc4),
Scalar(255, 255, 255), 2);
circle(background, cvtVector2Point(loc1), 4, Scalar(255, 0, 0), -1, LINE_AA);
circle(background, cvtVector2Point(loc2), 4, Scalar(0, 255, 0), -1, LINE_AA);
circle(background, cvtVector2Point(loc3), 4, Scalar(0, 0, 255), -1, LINE_AA);
circle(background, cvtVector2Point(loc4), 4, Scalar(0, 255, 255), -1, LINE_AA);
imshow("img", background);
waitKey(50);
background = Scalar(0, 0, 0);
}
}
return 0;
}
对应的CMake配置如下:
cmake_minimum_required(VERSION 3.12)
project(rotation2D)
set(CMAKE_CXX_STANDARD 11)
find_package(Eigen3 REQUIRED)
include_directories(${EIGEN3_INCLUDE_DIRS})
find_package(OpenCV REQUIRED)
include_directories(${OpenCV_INCLUDE_DIRS})
add_executable(rotation2D main.cpp)
target_link_libraries(${PROJECT_NAME} ${OpenCV_LIBS})
运行的效果如下动图所示。
(2)3D旋转
3D旋转在Eigen中除了用常规的旋转矩阵(Matrix3d表示)外,有两种表示:AngleAxis和Quaternion。
角轴表示
AngleAxis是角轴表示法,顾名思义给定旋转角度和旋转轴即可。其创建方式符合Eigen的原则,传入数据类型作为模板参数。旋转角度以弧度表示,旋转轴为Vector类型的向量,注意向量必须要被归一化(vec.normalized()即可)。Eigen中也预先定义好了AngleAxisd和AngleAxisf两种方便使用。其也有一些成员函数,由于都是继承自RotationBase,很多都是类似的,这里简单罗列如下:
-
.angle():返回弧度制表示的旋转角度 -
.axis():返回该旋转的旋转轴向量 -
.cast():将当前AngleAxis对象转为另一种AngleAxis -
.inverse():返回以AngleAxis表示的当前旋转的逆旋转 -
.isApprox():判断当前AngleAxis是否与给定AngleAxis近似相等,是的话返回true。判断精度由传入的第二个参数决定。 -
.fromRotationMatrix():从一个3 × 3的旋转矩阵构建AngleAxis对象。换句话说,本函数可以提取旋转矩阵所表示的旋转角,像这样:.fromRotationMatrix(m).angle()即可返回弧度制表示的旋转角度。 -
.toRotationMatrix():将当前AngleAxis对象转换为3 × 3的旋转矩阵。
简单使用示例如下:
#include <iostream>
#include <Eigen/Dense>
#include <Eigen/Geometry>
using namespace std;
using namespace Eigen;
int main() {
// yaw-z pitch-y roll-x,并转成弧度
float yaw = 10.3 * M_PI / 180;
float pitch = 15.8 * M_PI / 180;
float roll = 8.5 * M_PI / 180;
Matrix3f m;
m = AngleAxisf(roll, Vector3f::UnitX()) *
AngleAxisf(pitch, Vector3f::UnitY()) *
AngleAxisf(yaw, Vector3f::UnitZ());
cout << m << endl;
cout << "is unitary:" << m.isUnitary() << endl;
AngleAxisf aa;
aa.fromRotationMatrix(m);
cout << aa.toRotationMatrix() << endl;
return 0;
}
上述代码巧妙利用角轴方便地构建了一个旋转矩阵,实现了从欧拉角到旋转矩阵的转换。Matrix的成员函数isUnitary()表示该矩阵是否是一个酉矩阵(矩阵各列是否为标准正交基)。所谓酉矩阵定义是:n阶复方阵U的n个列向量是U空间的一个标准正交基,则U是酉矩阵(Unitary Matrix)。酉矩阵是正交矩阵往复数域上的推广。
四元数表示
Quaternion是四元数表示法,用于表示三维空间中的指向与旋转。关于什么是四元数这里不再多说,可以参考之前相关博客。相较于欧拉角和旋转矩阵,四元数的优势在于较小的存储量(4个数,相较于旋转矩阵的9个数)以及稳定的球面插值、没有奇异性(相较于欧拉角的万向锁)。它的缺点就是不够直观(相较于欧拉角)以及无法直接与向量、矩阵等运算(相较于旋转矩阵)。Quaternion的构造是标准Eigen格式:数据类型作为模板参数+构造参数,而且重载了多个构造函数,因此可以方便地从角轴、旋转矩阵等数据类型进行构造。特别需要注意四个数的传入顺序是w、x、y、z,对应w+xi+yj+zk。Eigen也提供了Quaternionf和Quaterniond方便使用。相关成员函数再罗列一下:
-
.w():返回四元数中的w分量(可修改) -
.x():返回四元数中的x分量(可修改) -
.y():返回四元数中的y分量(可修改) -
.z():返回四元数中的z分量(可修改) -
.coeffs():返回四元数的四个数(可修改),可以对其进行索引[]获取值。需要注意的是返回顺序是x、y、z、w,和定义的时候是不一样的。 -
.toRotationMatrix()&.matrix():将当前Quaternion对象转换为3 × 3的旋转矩阵。另外说一下,Quaternion没有fromRotationMatrix()函数,但因为重载了构造函数,使其也可以由旋转矩阵构造。 -
.norm():返回四元数的模长 -
.squaredNorm():返回四元数平方的模长 -
.slerp():对两个四元数进行球面线性插值(Spherical linear interpolation,通常简称Slerp),是四元数的一种线性插值运算,主要用于在两个表示旋转的四元数之间平滑差值。插值详细介绍可看参考资料[3]。 -
.inverse():返回以Quaternion表示的当前旋转的逆旋转 -
.normalize():归一化四元数,作用于其本身,没有返回值 -
.normalized():归一化四元数,返回归一化后的四元数 -
.Identity():返回一个表示单位旋转的四元数 -
.setIdentity():将自己设为表示单位旋转的四元数,set表示对自己修改。一般可用于对一个四元数变量进行初始化,如Quaternion::setIdentity()则将变量设置成了单位四元数 -
.conjugate():返回当前四元数的共轭四元数 -
.setFromTwoVectors():对自己进行修改,表示表示从向量a旋转到向量b的四元数。向量a、b不需要归一化,也不需要有相同模长。set表示对自己修改。 -
.FromTwoVectors():不对自己进行修改,返回一个表示从向量a旋转到向量b的四元数。向量a、b不需要归一化,也不需要有相同模长。 -
.angularDistance():返回两个四元数之间的角度距离 -
.cast():将当前Quaternion对象转为另一种Quaternion -
.isApprox():判断当前Quaternion是否与给定Quaternion近似相等,是的话返回true。判断精度由传入的第二个参数决定。 -
.dot():四元数的点乘,结果是一个数。注意区别四元数的数乘和乘法,它们的结果还是四元数。 -
.vec():以向量形式返回四元数的虚部(可修改),顺序为x、y、z。
简单使用示例如下:
#include <iostream>
#include <Eigen/Dense>
#include <Eigen/Geometry>
using namespace std;
using namespace Eigen;
int main() {
AngleAxisf aaf1(0.1,Vector3f::UnitX());
AngleAxisf aaf2(0.3,Vector3f::UnitY());
Quaternionf qf1(aaf1),qf2(aaf2);
cout<<qf1.coeffs()<<endl<<endl;
cout<<qf2.coeffs()<<endl<<endl;
Quaternionf inp_qf = qf1.slerp(0.4,qf2);
cout<<inp_qf.coeffs()<<endl;
return 0;
}
上述代码调用slerp()函数对两个四元数进行了插值。需要注意的是插值函数与之前说的一样,注意角度范围。
3.平移
相比于旋转,Translation会简单一些。这里2D和3D平移放在一起介绍。采用Eigen标准构造原则,构造示例如下:
Translation<float,2>(tx, ty)
Translation<float,3>(tx, ty, tz)
Translation<float,N>(s)
Translation<float,N>(vecN)
和之前一样,预先定义有Tanslation2f、Translation2d、Translation3f、Translation3d以供使用。多个平移合并用乘号而不是加号,需要注意。和旋转相比,它的成员函数也相对少一些,下面简单罗列:
-
.x():获取平移的x分量(可修改) -
.y():获取平移的y分量(可修改) -
.z():获取平移的z分量(可修改),注意,千万不要对一个二维的Translation获取z分量,否则直接会运行报错的:Process finished with exit code 134 (interrupted by signal 6: SIGABRT) -
.cast():将当前Translation对象转为另一种Translation -
.vector()&.translation():返回当前平移的向量表示(可修改),可以索引[]获取各分量 -
.Identity():返回单位平移(如二维是0,0,三维是0,0,0) -
.inverse():返回以Translation表示的当前平移的逆平移 -
.isApprox():判断当前Translation是否与给定Translation近似相等,是的话返回true。判断精度由传入的第二个参数决定。
简单使用示例如下:
#include <iostream>
#include <Eigen/Dense>
#include <Eigen/Geometry>
using namespace std;
using namespace Eigen;
int main() {
Translation2d t1(1,4);
Translation2d t2(2,7);
Translation2d t3;
t3=t1*t2;
cout<<t3.translation()<<endl;
return 0;
}
上述代码将两个平移变换合并成了一个总的平移变换。
4.缩放
在Eigen中,缩放本质上是对角阵中对角线上不同位置的数。如1行1列为0.5,则表示对第一维缩放0.5倍,以此类推。所以Eigen中可以使用对角阵实现缩放,也可以使用一些预定义好的类型,如下:
/** \addtogroup Geometry_Module */
//@{
/** \deprecated */
typedef DiagonalMatrix<float, 2> AlignedScaling2f;
/** \deprecated */
typedef DiagonalMatrix<double,2> AlignedScaling2d;
/** \deprecated */
typedef DiagonalMatrix<float, 3> AlignedScaling3f;
/** \deprecated */
typedef DiagonalMatrix<double,3> AlignedScaling3d;
//@}
一些成员函数如下:
-
.diagonal():返回对角阵的对角线元素(可修改) -
.inverse():返回一个逆缩放,逆缩放是指将当前缩放系数取倒数,如5的逆缩放就是0.2 -
.size():继承于Matrix的成员函数,返回矩阵元素个数 -
.cols():继承于Matrix的成员函数,返回矩阵列数 -
.rows():继承于Matrix的成员函数,返回矩阵行数
简单使用示例如下:
#include <iostream>
#include <Eigen/Dense>
#include <Eigen/Geometry>
using namespace std;
using namespace Eigen;
int main() {
AlignedScaling2d s(1.5,0.4);
Vector2d vec1(3,8);
Vector2d vec2;
vec2 = s*vec1;
cout<<vec2<<endl;
return 0;
}
上述代码对一个向量的不同维进行了不同尺度的缩放。
5.变换
在介绍变换之前,先简单回顾一下基本概念。以下变换都是在三维情况下。
一个欧式变换的矩阵表示形式如下:
\[\begin{pmatrix} R & t\\ 0^{T} & 1 \end{pmatrix}\]旋转和平移各有三个自由度,因此一共有6个自由度,其保持长度、夹角、体积的不变性。也正因为如此,欧式变换又被称为刚体变换或刚体运动。
相似变换在欧式变换基础上有增加了缩放,矩阵表示形式如下:
\[\begin{pmatrix} sR & t\\ 0^{T} & 1 \end{pmatrix}\]s为缩放尺度(三轴缩放相等,所以只算一个),因此其一共有7个自由度,其保持体积比不变。相比于欧式变换的刚体,这里可以认为是非刚体运动。
仿射变换矩阵表示形式如下:
\[\begin{pmatrix} A & t\\ 0^{T} & 1 \end{pmatrix}\]仿射变换与前两种变换最大的不同在于,其对于旋转部分只要求是可逆矩阵A,而并非需要旋转矩阵R(正交阵)。它保证的是线的平行性和体积(面积)比。这样导致的结果就是矩阵A有9个自由度,再加上平移的3个,一共有12个自由度。
射影变换的矩阵表示形式如下:
\[\begin{pmatrix} A & t\\ a^{T} & v \end{pmatrix}\]左上角A为可逆矩阵,右上角t为平移,左下角a为缩放。若v不为0时,可对整个矩阵除以v,得到一个右下角为1的矩阵;否则得到一个右下角为0的矩阵。A有9个自由度、t有3个自由度、a有三个自由度,一共有15个自由度。自由度现实的理解就是对应可以求解的方程个数。
因此变换其实是从更一般的视角去看待上面提到的旋转、缩放、平移或者它们的混合,所以在实际场景用应用也最多。上面介绍的旋转、平移、缩放更多时候都是为新建或初始化这些变换准备的。在线代中,所有变换本质上都可以看作是矩阵相乘,Eigen中也不例外,各种变换都是Transform类的特例。Transform类可以看作是一个矩阵,所有的变换都可以调用成员函数.matrix()获得这个矩阵。例如对于一个仿射变换,其内部存储的矩阵如下:
注意矩阵中不同部分的名称,Eigen中有获取这些部分的函数,名称是对应的。
对于变换的应用,在Eigen中使用乘号进行连接,且遵循左乘规则(变换在左边)。如v'=T x v,表示对v进行一个T变换得到v'。对于多个变换连接,同样遵循左乘原则,如t3 = t2 x t1。
实际使用中,常见的包括等距变换(Isometry)、仿射变换(Affine)、射影变换(Prospective)等Eigen已经预定义好了相关类,下面进行介绍。
(1)等距变换
等距变换(Isometry Transform)可以看作是维持任意两点距离不变的仿射变换,也称做欧氏变换、刚体运动,在实际场景中使用比较多。在Eigen中已经内置好了一些常用的等距变换可以直接调用,如下。
/** \ingroup Geometry_Module */
typedef Transform<float,2,Isometry> Isometry2f;
/** \ingroup Geometry_Module */
typedef Transform<float,3,Isometry> Isometry3f;
/** \ingroup Geometry_Module */
typedef Transform<double,2,Isometry> Isometry2d;
/** \ingroup Geometry_Module */
typedef Transform<double,3,Isometry> Isometry3d;
新建方法十分简单,直接类型名+变量名即可,赋值可以通过它的成员函数.rotate()和.translate()完成(须先初始化为单位阵)。三维等距变换是一个4×4的矩阵。但在构建一个变换前,你首先要想清楚两个问题:这个变换顺序(先平移后旋转or先旋转后平移)是什么?这个变换相对谁改变(固定轴or自身)?不同的答案会得到不同的结果,代码也不尽相同。以下是一个标准的新建并初始化按固定轴先平移再旋转变换的例子:
# include<iostream>
# include<Eigen\Dense>
# include<Eigen\Geometry>
using namespace std;
using namespace Eigen;
int main(){
AngleAxisd rotation(3.1415926 / 4, Vector3d(1, 0, 1).normalized());
Vector3d translation(1, 3, 4);
Isometry3d T= Isometry3d::Identity();
T.translate(translation);
T.rotate(rotation);
cout << "rotation matrix:" << endl << rotation.toRotationMatrix() << endl << endl;
cout << "translation vector:" << endl << translation << endl << endl;
cout << "translation matrix:" << endl << T.matrix() << endl << endl;
system("pause");
return 0;
}
代码运行如下:
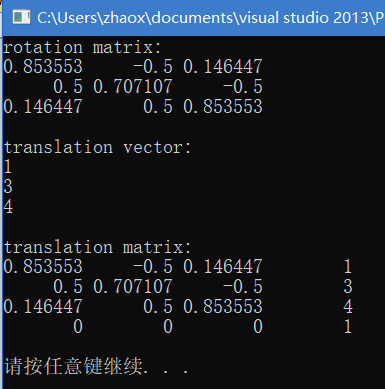 上述代码中构建了一个角轴表示的旋转、一个平移向量以及一个初始的单位变换。注意这里必须要调用
上述代码中构建了一个角轴表示的旋转、一个平移向量以及一个初始的单位变换。注意这里必须要调用 Isometry3d::Identity()对它进行初始化(或者调用.setIdentity()设置),后面的.translate()和.rotate()函数才有用。因为这些函数本质上都是矩阵乘法,而如果没初始化,Isometry3d中的元素全为0(或者非常大的负数),这样等于是和0矩阵相乘,结果会不对。
如果你要说我就不初始化为单位阵行不行?也可以,那就不要调用.translate()和.rotate()函数,直接调用.matrix()函数获取对应的变换矩阵,然后手动自己设置(构造),像下面这样。
# include<iostream>
# include<Eigen\Dense>
# include<Eigen\Geometry>
using namespace std;
using namespace Eigen;
int main(){
AngleAxisd rotation(3.1415926 / 4, Vector3d(1, 0, 1).normalized());
Vector3d translation(1, 3, 4);
Isometry3d T;
// 设置旋转R部分
T.matrix().block(0, 0, 3, 3) = rotation.toRotationMatrix();
// 设置平移t部分,.homogeneous()函数用于将平移向量变成对应的齐次表达形式
T.matrix().col(3) = translation.homogeneous();
// 设置最后一行
T.matrix().row(3) = Vector4d(0, 0, 0, 1);
cout << "rotation matrix:" << endl << rotation.toRotationMatrix() << endl << endl;
cout << "translation vector:" << endl << translation << endl << endl;
cout << "translation matrix:" << endl << T.matrix() << endl << endl;
system("pause");
return 0;
}
上面两种方式演示了基本的新建变换的步骤,可以发现很多成员函数如.translate()、.rotate()、.pretranslate()、.prerotate()等起了关键作用,这些函数是什么意思、怎么用,下面简单进行说明。
这些函数准确来说是用来“应用变换”的,变换在线代里即为矩阵相乘,这些函数将当前变换与输入的参数相乘,从而得到新的变换。有且仅当变换为单位阵时,这样等价于对变换赋值。A.translate(B)等价于A×B,而A.pretranslate(B)等价于B×A,对应于左乘和右乘的区别。
在应用角度而言,回到之前说的两个问题,这些函数就与它们有关。简单来说就是,凡是前面带pre的函数,其变化都是相对于上一步变化之前的状态进行的。这样说可能有些绕,举例说就是我要新建一个按固定轴平移旋转(世界坐标系下)、先平移后旋转的变换。但我首先设置了旋转,然后再设置平移。这个时候设置平移就不能用.translate()了,而应该用.pretranslate()。因为第一步已经对坐标系进行了旋转,后面的平移是在旋转后的坐标系中进行的,这显然和我设想的不一样。我需要在未旋转的坐标系上(世界坐标系)进行平移。下面代码演示了这种现象:
# include<iostream>
# include<Eigen\Dense>
# include<Eigen\Geometry>
using namespace std;
using namespace Eigen;
int main(){
AngleAxisd rotation(3.1415926 / 4, Vector3d(1, 0, 1).normalized());
Vector3d translation(1, 3, 4);
Isometry3d T1 = Isometry3d::Identity();
Isometry3d T2 = Isometry3d::Identity();
Isometry3d T3 = Isometry3d::Identity();
T1.translate(translation);
T1.rotate(rotation);
T2.rotate(rotation);
T2.pretranslate(translation);
T3.rotate(rotation);
T3.translate(translation);
cout << "rotation matrix:" << endl << rotation.toRotationMatrix() << endl << endl;
cout << "translation vector:" << endl << translation << endl << endl;
cout << "translation matrix1:" << endl << T1.matrix() << endl << endl;
cout << "translation matrix1:" << endl << T2.matrix() << endl << endl;
cout << "translation matrix1:" << endl << T3.matrix() << endl << endl;
system("pause");
return 0;
}
运行结果如下:
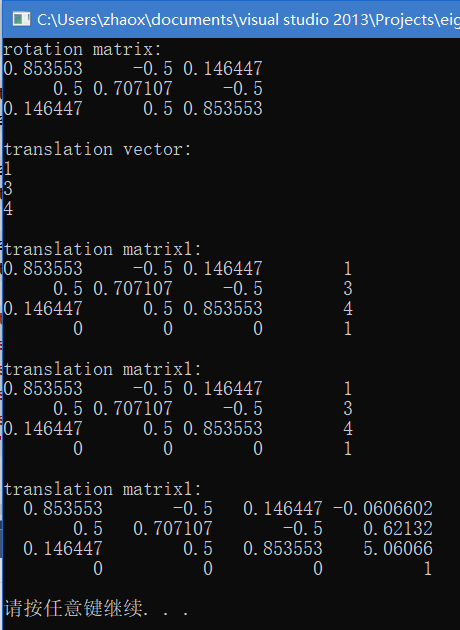 在代码中建了3个变换,其中1和2是等价的,而3的平移部分作为对比没有使用
在代码中建了3个变换,其中1和2是等价的,而3的平移部分作为对比没有使用.pretranslate(),可以看到和我们预期的不一样。其实这等于是按自身进行变换了,这在欧拉角的旋转中倒是有用。之前说过欧拉角有两种不同的定义方式:按自身旋转和按固定轴旋转。
常用的一些成员函数列举如下:
-
.translation():无参数,返回当前变换平移部分的向量表示(可修改),可以索引[]获取各分量 -
.translationExt():无参数,如果当前变换是仿射的话,返回平移部分(可修改);如果是射影变换的话,返回最后一列(可修改) -
.translate():有参数,用于在当前变换上应用右乘,A.translate(B)等价于A×B -
.pretranslate():有参数,用于在当前变换上应用左乘,A.pretranslate(B)等价于B×A -
.rotation():无参数,返回只读的当前变换的旋转部分,以旋转矩阵表示 -
.rotate():有参数,用于设置当前变换的旋转部分,输入参数可以为角轴、四元数、旋转矩阵等。A.rotate(B)等价于A×B -
.prerotate():有参数,用于设置当前变换的旋转部分,输入参数可以为角轴、四元数、旋转矩阵等。A.prerotate(B)等价于B×A -
.matrix():返回变换对应的矩阵(可修改) -
.cols():变换对应矩阵的列数 -
.rows():变换对应矩阵的行数 -
.linear()&.linearExt():返回变换的线性部分,对于Isometry而言就是旋转对应的旋转矩阵 -
.inverse():返回当前变换的逆变换 -
.Identity():返回一个单位变换,一般可用于Isometry的初始化中,将变换设为一个单位阵:Isometry3d::Identity() -
.setIdentity():将当前变换变成单位变换,变换对应的矩阵变成单位阵,也可用于初始化赋值 -
.cast():将当前类型的变换转换为其它类型的变换,如Isometry3d转Isometry3f -
.data():返回一个指向变换内部矩阵的指针,矩阵按照列优先存储 -
.computeRotationScaling():将当前变换的线性部分分解成rotation和scaling的乘积 -
.computeScalingRotation():将当前变换的线性部分分解成scaling和rotation的乘积 -
.fromPositionOrientationScale():从一个3D对象的位置、指向以及缩放来设置一个变换 -
.prescale():有参数,用于在当前变换上应用右乘,A.translate(B)等价于A×B -
.scale():有参数,用于在当前变换上应用右乘,A.translate(B)等价于A×B -
.preshear():只针对2D情况,沙尔变换,有参数,用于在当前变换上应用左乘,A.preshear(B)等价于B×A -
.shear():只针对2D情况,沙尔变换,有参数,用于在当前变换上应用右乘,A.shear(B)等价于A×B -
.affine():无参数,返回当前变换的仿射部分(可修改),对于Isometry3d而言,返回的是一个4×3的矩阵 -
makeAffine():将变换对应的矩阵的最后一行设为0,0,…,1 -
.isApprox():判断当前Isometry是否与给定Isometry近似相等,是的话返回true。判断精度由传入的第二个参数决定。
简单使用示例如下:
# include<iostream>
# include<Eigen\Dense>
# include<Eigen\Geometry>
using namespace std;
using namespace Eigen;
int main(){
Isometry3d transform;
transform.setIdentity();
transform.translate(Vector3d(1.5, 2, 3));
transform.rotate(AngleAxisd(0.1, Vector3d::UnitX()));
cout << "transform matrix:\n" << transform.matrix() << endl << endl;
Vector3d vec1(4.3, 5, 3.2),vec2;
vec2 = transform*vec1;
cout << vec1 << endl << endl;
cout << vec2 << endl;
system("pause");
return 0;
}
构造了一个三维刚体变换并将其应用到了vec1这个向量上。
(2)仿射变换
仿射变换是空间直角坐标变换的一种,保留线的平行性。仿射变换一般按照TRSI的顺序进行构建,T-translation,R-rotation,S-scaling,I-identity。
Transform<float,N,Affine> t = concatenation_of_any_transformations;
Transform<float,3,Affine> t = Translation3f(p) * AngleAxisf(a,axis) * Scaling(s);
为了方便Eigen中已经定义好了一些常用类型,如下:
/** \ingroup Geometry_Module */
typedef Transform<float,2,Affine> Affine2f;
/** \ingroup Geometry_Module */
typedef Transform<float,3,Affine> Affine3f;
/** \ingroup Geometry_Module */
typedef Transform<double,2,Affine> Affine2d;
/** \ingroup Geometry_Module */
typedef Transform<double,3,Affine> Affine3d;
由于仿射变换的成员函数和Isometry是一模一样的,这里就不再介绍了。下面是一个简单的使用示例。
# include<iostream>
# include<Eigen\Dense>
# include<Eigen\Geometry>
using namespace std;
using namespace Eigen;
int main(){
Affine2d affine;
affine.setIdentity();
affine.translate(Vector2d(1.2, 3));
affine.rotate(Rotation2Dd(0.1));
cout << "affine matrix:\n" << affine.matrix() << endl << endl;
Matrix<double, 2, 3> vecs1,vecs2;
vecs1 << 1, 2, 3, 4, 5, 6;
cout << "original vectors:\n" << vecs1 << endl << endl;
vecs2 = affine*vecs1;
cout << "affined vectors:\n" << vecs2 << endl;
system("pause");
return 0;
}
利用2D仿射变换对多个向量进行了批量变换。
(3)射影变换
射影变换是最一般的变换,其保证的是接触平面的相交或相切。Eigen中预定好的一些类型如下。
/** \ingroup Geometry_Module */
typedef Transform<float,2,Projective> Projective2f;
/** \ingroup Geometry_Module */
typedef Transform<float,3,Projective> Projective3f;
/** \ingroup Geometry_Module */
typedef Transform<double,2,Projective> Projective2d;
/** \ingroup Geometry_Module */
typedef Transform<double,3,Projective> Projective3d;
它的成员函数和Isometry也是一模一样的,这里也不再介绍了。下面是一个简单的使用示例。
# include<iostream>
# include<Eigen\Dense>
# include<Eigen\Geometry>
using namespace std;
using namespace Eigen;
int main(){
Projective3d prj;
prj.setIdentity();
cout << prj.matrix() << endl;
system("pause");
return 0;
}
6.参考资料
- [1]http://eigen.tuxfamily.org/dox/group__TutorialGeometry.html
- [2]http://eigen.tuxfamily.org/dox/classEigen_1_1Rotation2D.html
- [3]https://www.cnblogs.com/21207-iHome/p/6952004.html
- [4]http://eigen.tuxfamily.org/dox/classEigen_1_1AngleAxis.html
- [5]http://eigen.tuxfamily.org/dox/classEigen_1_1Quaternion.html
- [6]http://eigen.tuxfamily.org/dox/classEigen_1_1Translation.html
- [7]http://eigen.tuxfamily.org/dox/classEigen_1_1Transform.html#adf4c6d97bd3f10edfa95bb04331ec8ed
- [8]http://eigen.tuxfamily.org/dox/classEigen_1_1Transform.html
- [9]https://stackoverflow.com/questions/51315825/precedence-in-eigen-transformations-and-difference-between-pretranslate-and-tran
- [10]https://stackoverflow.com/questions/25504397/eigen-combine-rotation-and-translation-into-one-matrix
本文作者原创,未经许可不得转载,谢谢配合
