- 1.Visual Features
- 2.Singular Vaule Decomposition
- 3.RANSAC
- 4.3D-3D Pose
- 5.Pose Estimation
- 6.Assignment-Image Projection
Robotics:Perception课程Week3的测验与作业习题,如果有错误的地方欢迎提出、交流。注意本博客中的题目与答案仅供学习交流使用,严禁用于抄袭等不守信行为。若因抄袭答案导致Coursera账号被取消激活,本博客概不负责。
1.Visual Features
 考察视觉特征的用途,可以用来场景重建、影像检索、基于影像的定位以及全景图拼接,所以答案是ABCD。
考察视觉特征的用途,可以用来场景重建、影像检索、基于影像的定位以及全景图拼接,所以答案是ABCD。
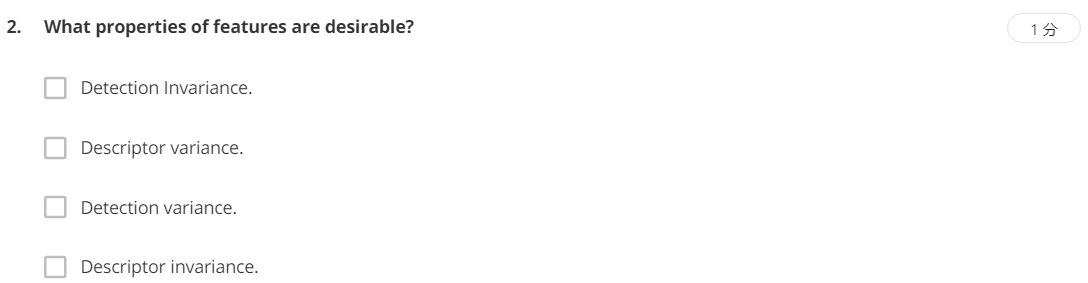 考察特征应该具有的性质。检测子和描述子都应该具有不变性,所以选AD。
考察特征应该具有的性质。检测子和描述子都应该具有不变性,所以选AD。
 影像尺度空间的建立方法,通过高斯卷积和下采样实现,选B。
影像尺度空间的建立方法,通过高斯卷积和下采样实现,选B。
 True。考察SIFT的尺度选择方法。
True。考察SIFT的尺度选择方法。
 考察SIFT的特点,具有旋转与缩放不变性,选C。
考察SIFT的特点,具有旋转与缩放不变性,选C。
 考察SIFT描述子计算方法,选A。
考察SIFT描述子计算方法,选A。
2.Singular Vaule Decomposition
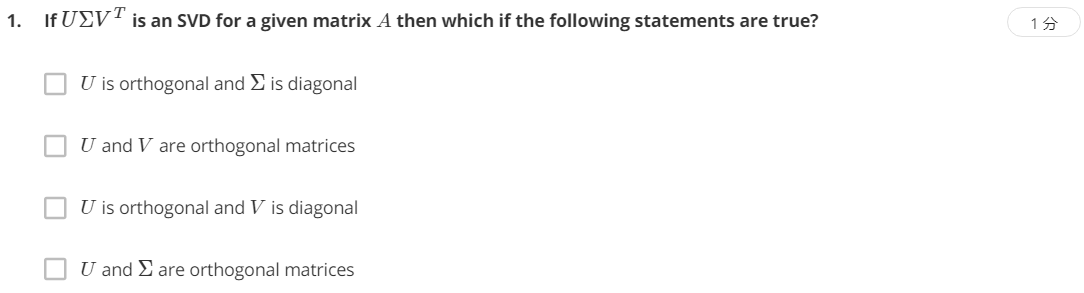 考察SVD分解的性质,U、V是正交的,S是对角阵,选AB。
考察SVD分解的性质,U、V是正交的,S是对角阵,选AB。
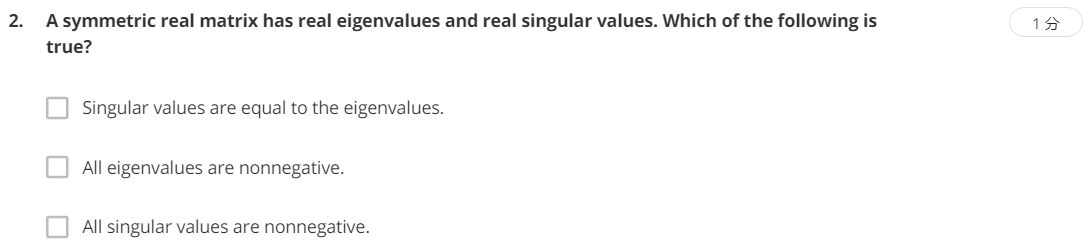 选C,所有奇异值都大于0。考察矩阵的奇异值与特征值之间的关系。
选C,所有奇异值都大于0。考察矩阵的奇异值与特征值之间的关系。
 对其进行SVD分解,S的(1,1)位置的元素记为奇异值的最大值,为2。
对其进行SVD分解,S的(1,1)位置的元素记为奇异值的最大值,为2。
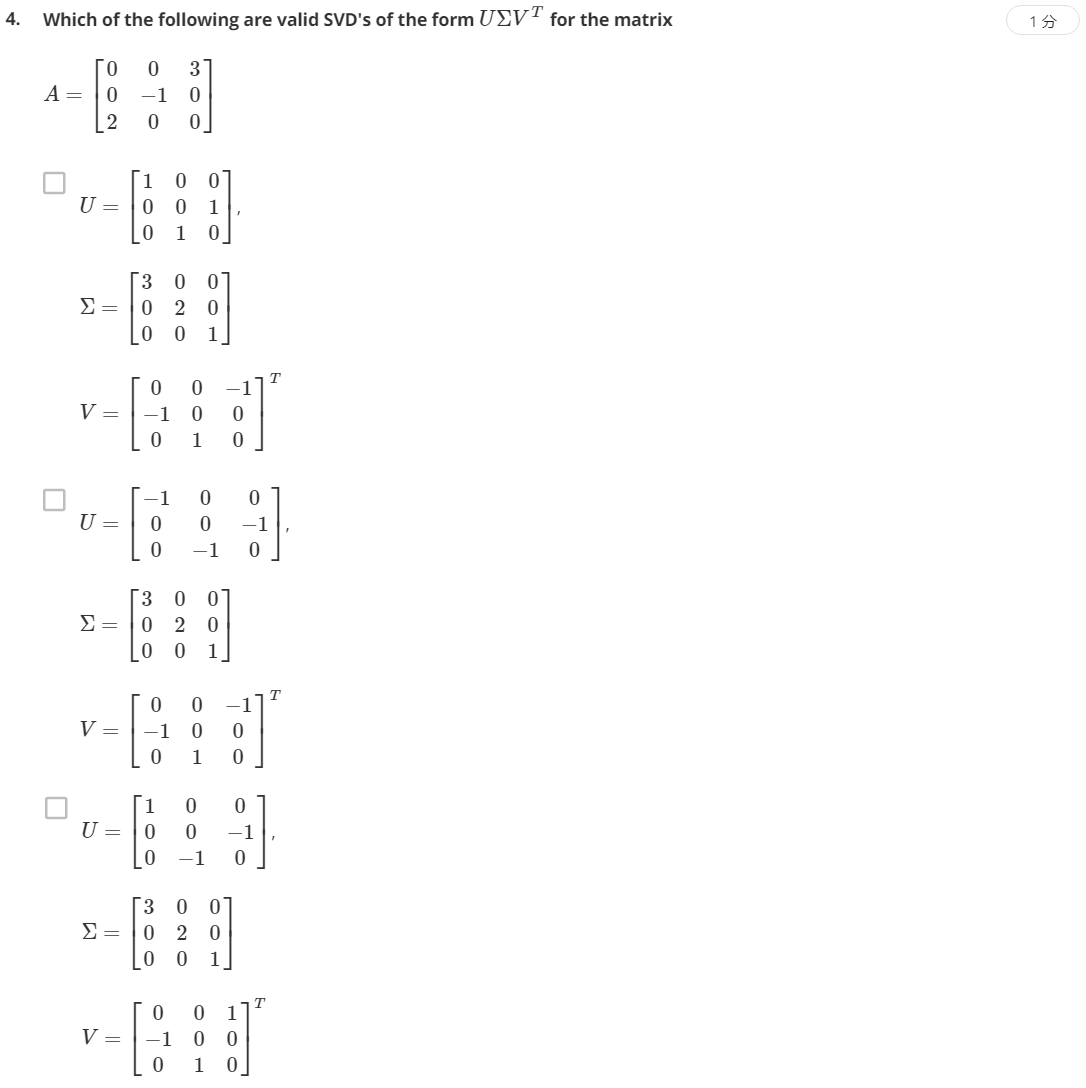 最简单的办法是将U、S、VT相乘看谁能得到A,答案选B、C。
最简单的办法是将U、S、VT相乘看谁能得到A,答案选B、C。
 矩阵的秩,答案为4。
矩阵的秩,答案为4。
 矩阵的秩等于非零奇异值个数,选B。
矩阵的秩等于非零奇异值个数,选B。
 答案选A,最小值。对A进行奇异值分解,分解得到的V的最右边一列即为解。
答案选A,最小值。对A进行奇异值分解,分解得到的V的最右边一列即为解。
 考察利用SVD解最小二乘拟合问题,对稀疏矩阵SVD分解,V的最右边一列即为结果,答案是B。当然还可以依次带入,看谁总误差最小。
考察利用SVD解最小二乘拟合问题,对稀疏矩阵SVD分解,V的最右边一列即为结果,答案是B。当然还可以依次带入,看谁总误差最小。
3.RANSAC
 在300个样本中有200个内点,挑选10个点建立模型,求得到正确模型的概率。根据课件上的公式,直接带入,有w=200/300,w^n即是概率,保留三位小数是0.017。
在300个样本中有200个内点,挑选10个点建立模型,求得到正确模型的概率。根据课件上的公式,直接带入,有w=200/300,w^n即是概率,保留三位小数是0.017。
 在迭代100次后不能得到正确模型的概率。还是根据公式(1-w^n)^k=1-p,可以直接算出为0.174。
在迭代100次后不能得到正确模型的概率。还是根据公式(1-w^n)^k=1-p,可以直接算出为0.174。
 要想让成功率大于0.99,至少应该迭代多少次。k=log(1-p)/log(1-w^n),算得为263.248,向上取整为264。
要想让成功率大于0.99,至少应该迭代多少次。k=log(1-p)/log(1-w^n),算得为263.248,向上取整为264。
4.3D-3D Pose
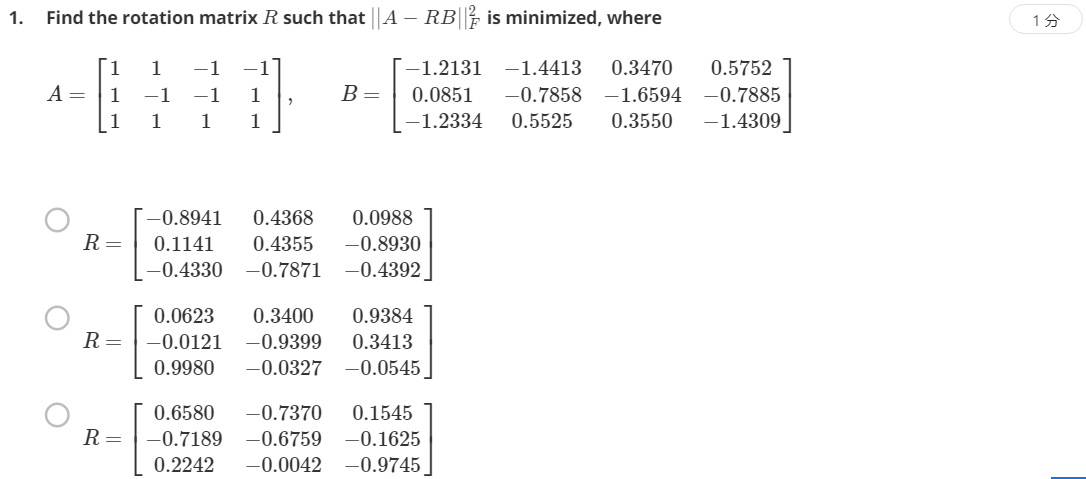 给定两组点A、B求R。对应之前笔记中此部分的公式,按照公式计算即可,对BA^T进行SVD分解,然后R=VU^T答案是A。
给定两组点A、B求R。对应之前笔记中此部分的公式,按照公式计算即可,对BA^T进行SVD分解,然后R=VU^T答案是A。
5.Pose Estimation
 至少需要3个。
至少需要3个。
 P3P问题最多可以得到4组解。
P3P问题最多可以得到4组解。
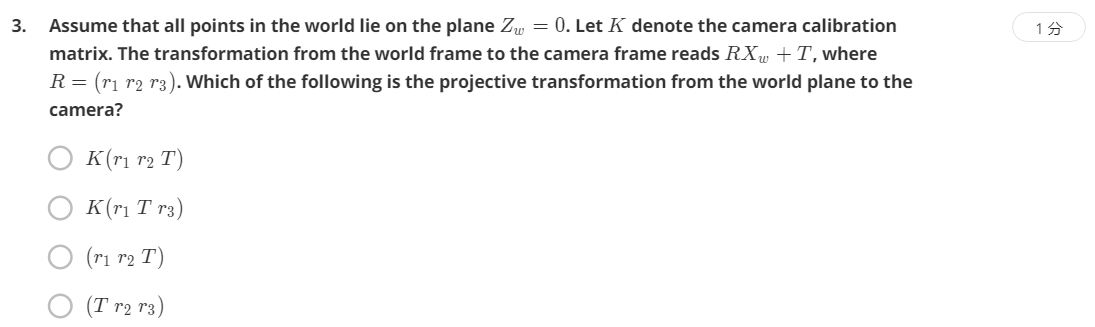 从世界到相机,需要转成像素坐标,所以肯定需要有K,同时在Zw=0平面上,没有r3,所以选A。
从世界到相机,需要转成像素坐标,所以肯定需要有K,同时在Zw=0平面上,没有r3,所以选A。
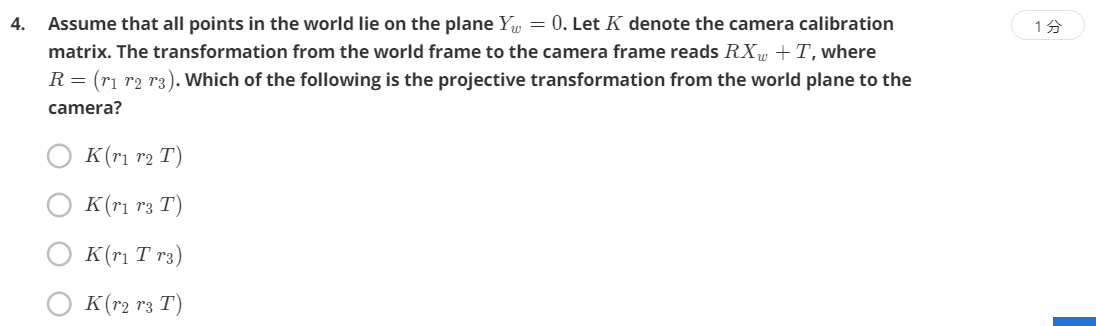 同理,在Yw=0平面上,没有r2,所以H矩阵第二列为r3,选B。需要注意的是并不是想当然的说答案为K(r1 T r3)。单应矩阵H的形式是不变的,前两列表示旋转,最后一列表示平移。对于不同平面,变得只是前两列的组合,如r1 r2、r1 r3、r2 r3。
同理,在Yw=0平面上,没有r2,所以H矩阵第二列为r3,选B。需要注意的是并不是想当然的说答案为K(r1 T r3)。单应矩阵H的形式是不变的,前两列表示旋转,最后一列表示平移。对于不同平面,变得只是前两列的组合,如r1 r2、r1 r3、r2 r3。
6.Assignment-Image Projection
本次的作业时要实现一个简单的增强现实(AR)效果,结果如下动图演示。原题点击查看,提取码是mksu。
对于这个作业,需要补充的是ar_cube.m、est_homography.m、track_corners.m,其中est_homography.m在作业二中已经写好了,直接复制过来用即可。track_corners.m利用KLT跟踪算法对在初始帧上人工指定的AprilTag角点进行跟踪。跟踪到角点以后,利用est_homography.m文件计算此时相机相对于AprilTag所在平面的单应矩阵,最后利用ar_cube.m将单应矩阵分解为R、t。整个过程是一环扣一环的,如果上一个步骤得到的结果错了,后面写的对也没用,所以要仔细检查每个步骤到底是否正确。
对于track_corners.m利用KLT跟踪角点没什么特别好说的,直接调用Matlab中的计算机视觉库就可以了。使用API的官方文档点此查看,照葫芦画瓢就可以完成了。
对于est_homography.m中的难点在作业二中已经说过了,要注意的就是求解得到的V的最后一列是按H的行排列的,千万不要弄错了,不然结果肯定算不对。
对于ar_cube.m按照PDF里的指导基本能写出来。根据PDF中的提示,首先对H矩阵中平移t的z分量为负数的乘以负号变成正的。然后构造一个Rp,它是由H矩阵的第一列、第二列以及第一列与第二列的叉乘构成。借着对Rp进行SVD分解,得到U、V。基于此,为了使旋转矩阵的行列式为1,按照下式计算R = U*[1,0,0;0,1,0;0,0,det(U*V')]*V';。而对于平移,则直接用H矩阵的第三列除以H的第一列正则化即可。得到了R、t后,使用Xc = K*(R*render_points(i,:)'+t);转换到相机坐标,对其同时除以坐标对应的z分量,使z分量为1,变成齐次表示,这样坐标的前两维即是像素坐标了。
完整代码点击这里下载,提取码:v4j2。
本文作者原创,未经许可不得转载,谢谢配合
