1.Visual Odometry
2.Bundle Adjustment Part1
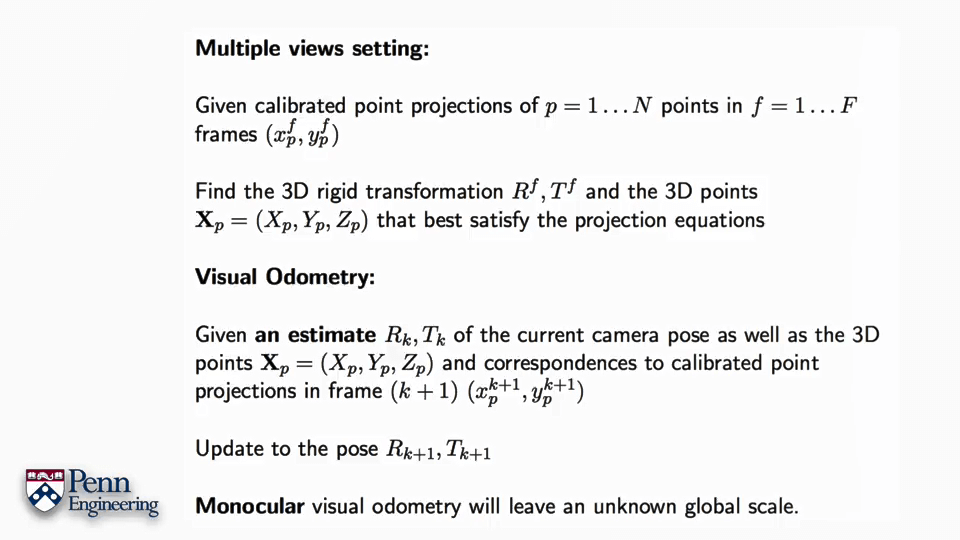
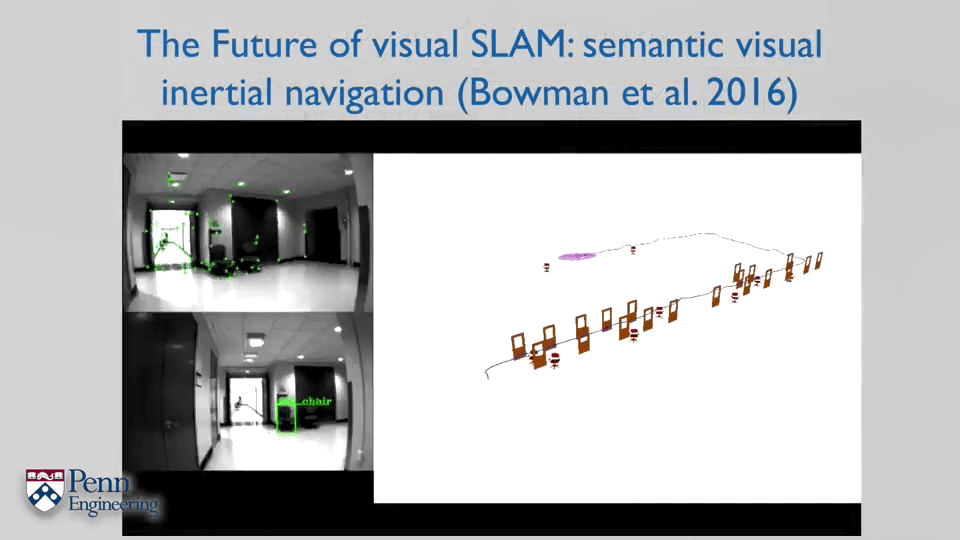
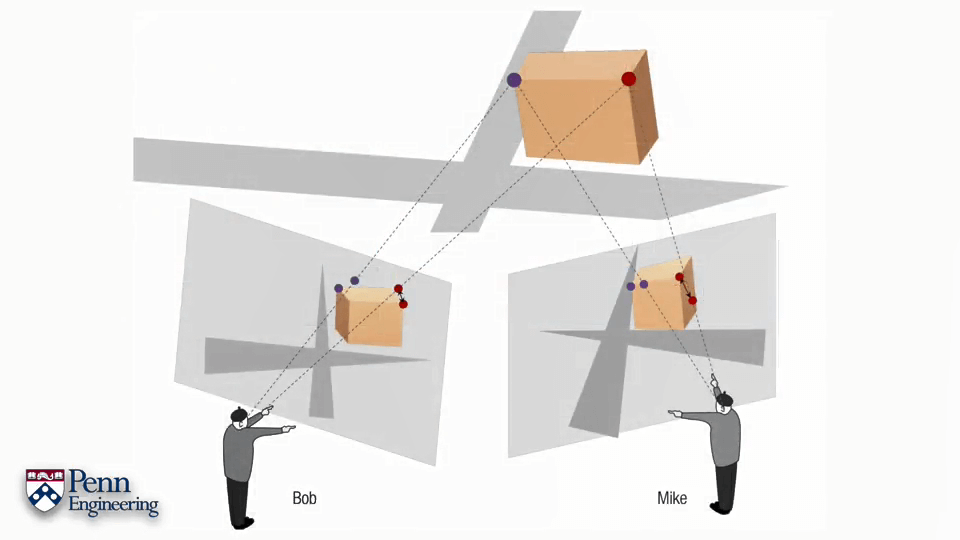
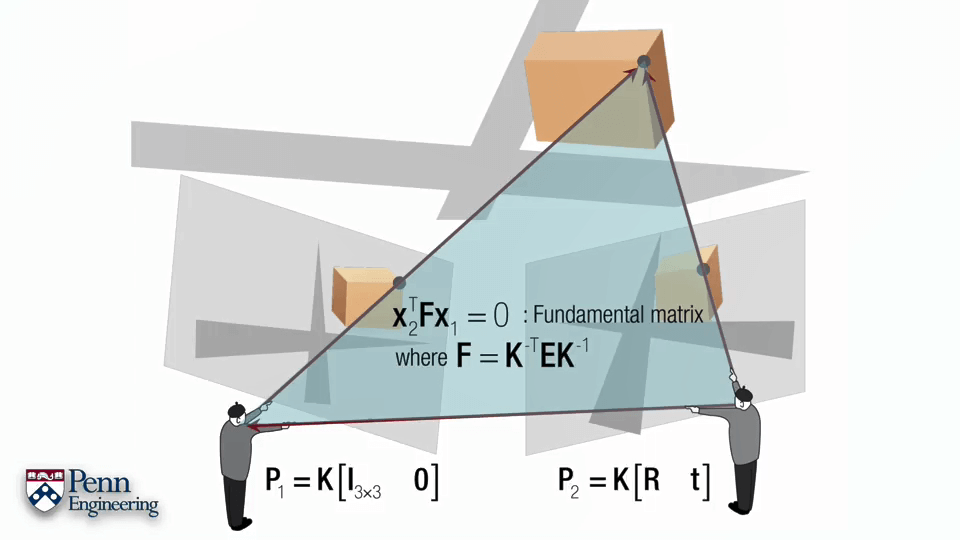
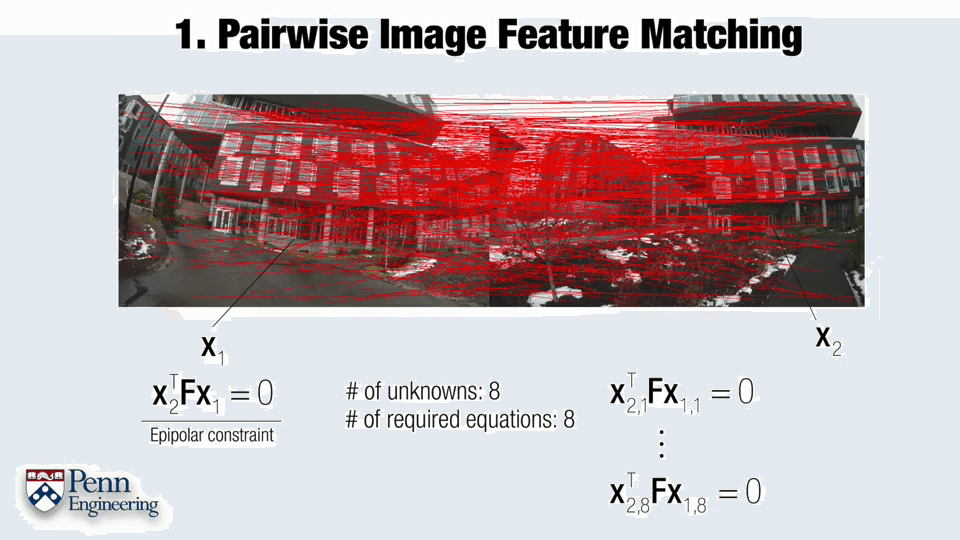
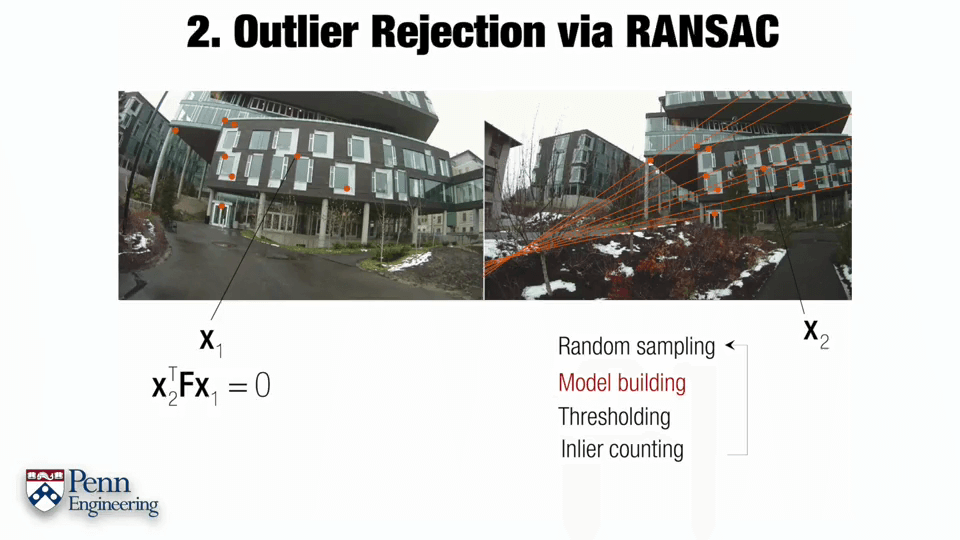
一切都从两个基本问题出发:我在哪?某个点在3D坐标系的位置是什么?
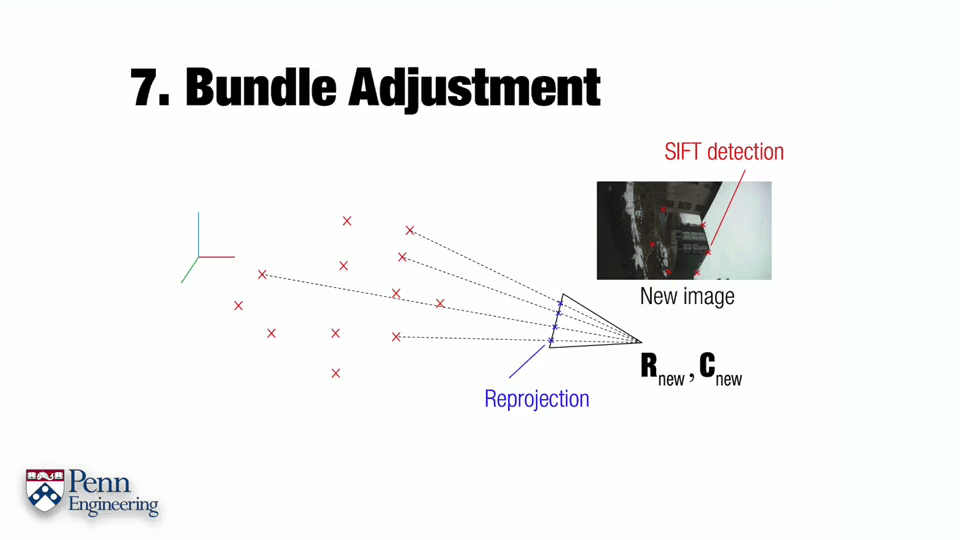
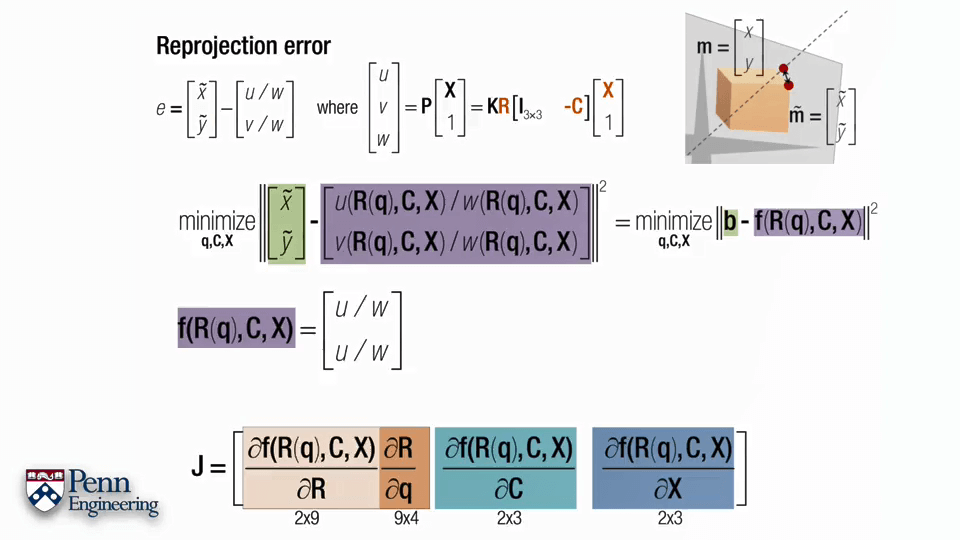
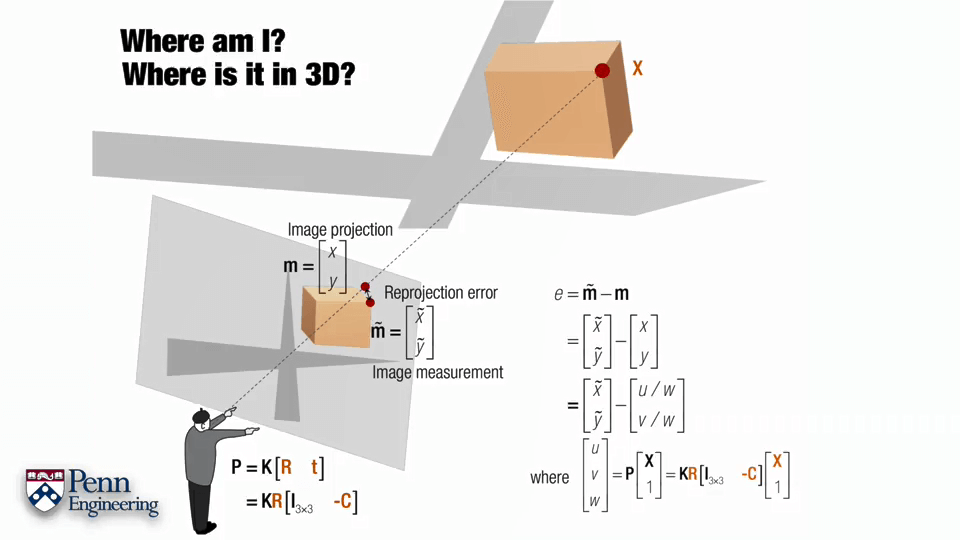 由于估计的投影矩阵P有误差,进而导致投影回到像平面的点m和我们观测的m~点坐标有差异,这个差异e可以理解为重投影误差,也就是我们需要尽可能减小的。
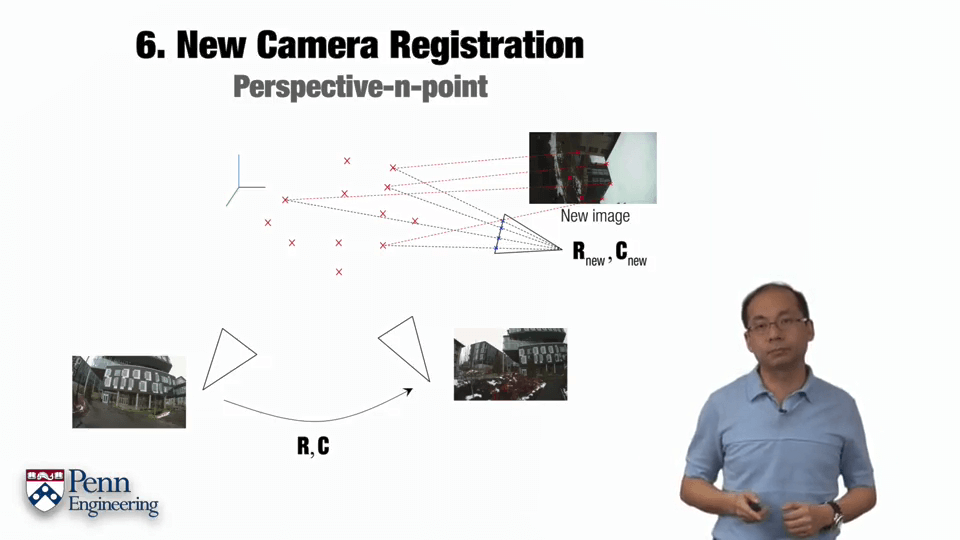
这里C是相机光心在世界坐标系中的坐标,X为该点在世界坐标系中的坐标,R为相机姿态。这三个橙色的字母就是我们需要调整优化的变量。
由于估计的投影矩阵P有误差,进而导致投影回到像平面的点m和我们观测的m~点坐标有差异,这个差异e可以理解为重投影误差,也就是我们需要尽可能减小的。
这里C是相机光心在世界坐标系中的坐标,X为该点在世界坐标系中的坐标,R为相机姿态。这三个橙色的字母就是我们需要调整优化的变量。
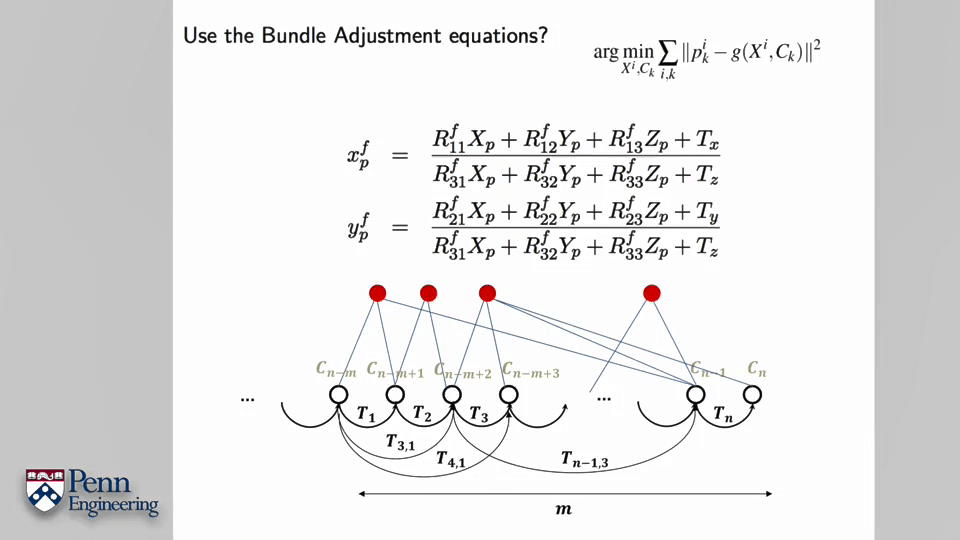
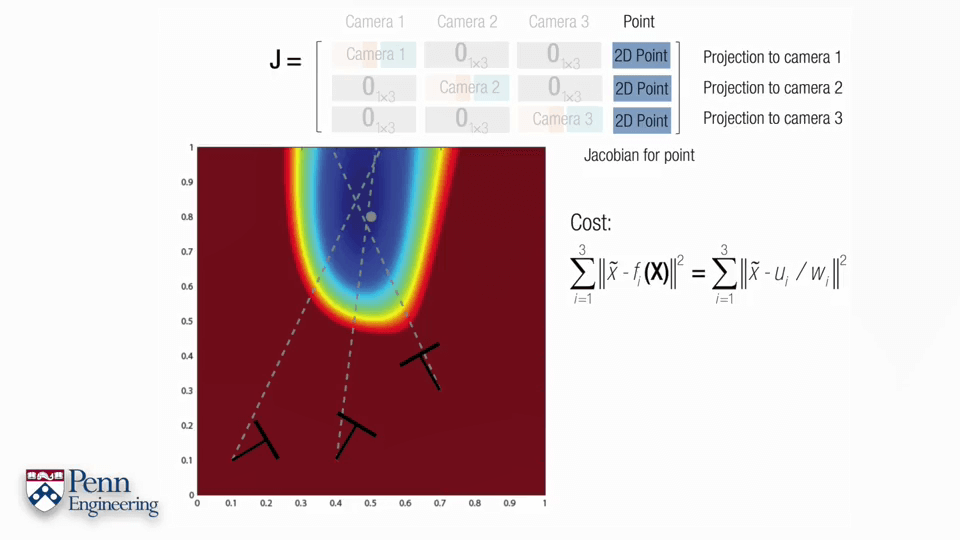
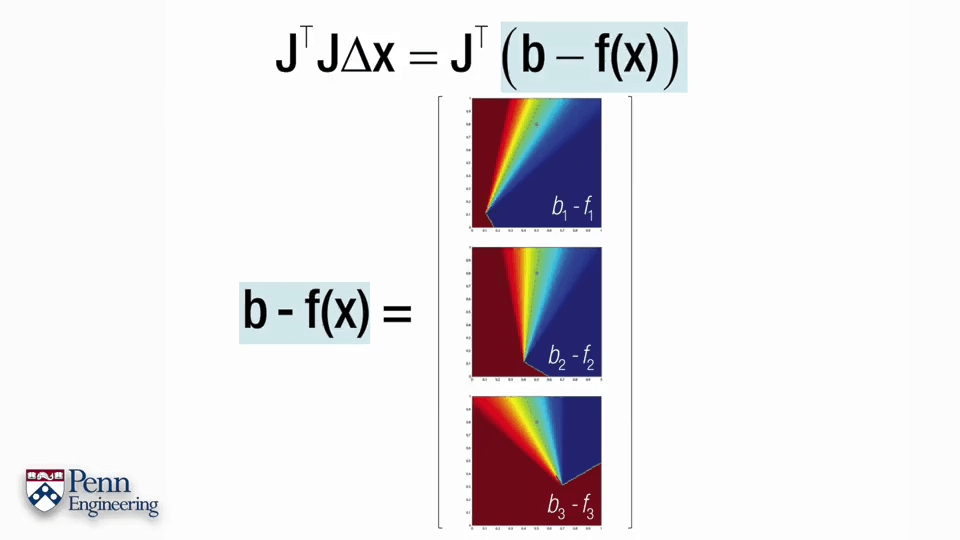
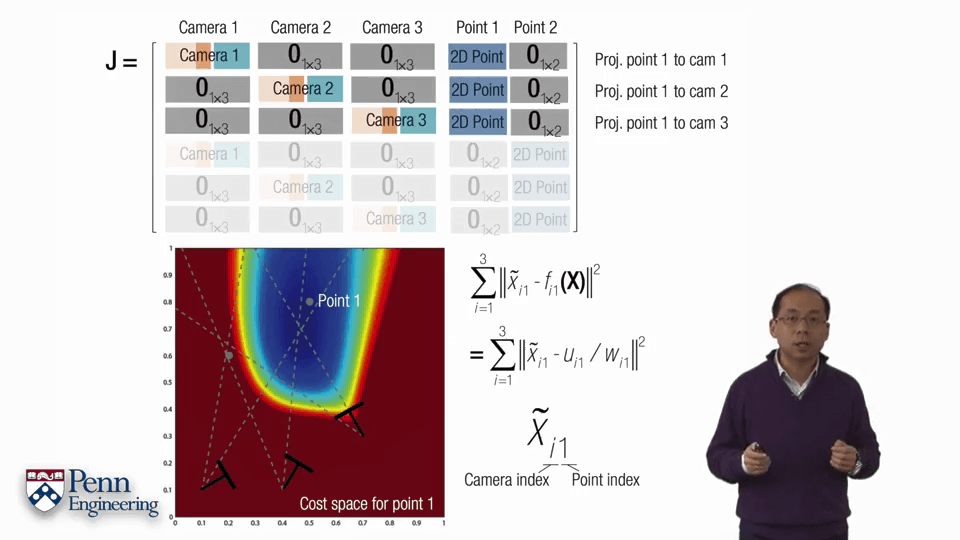
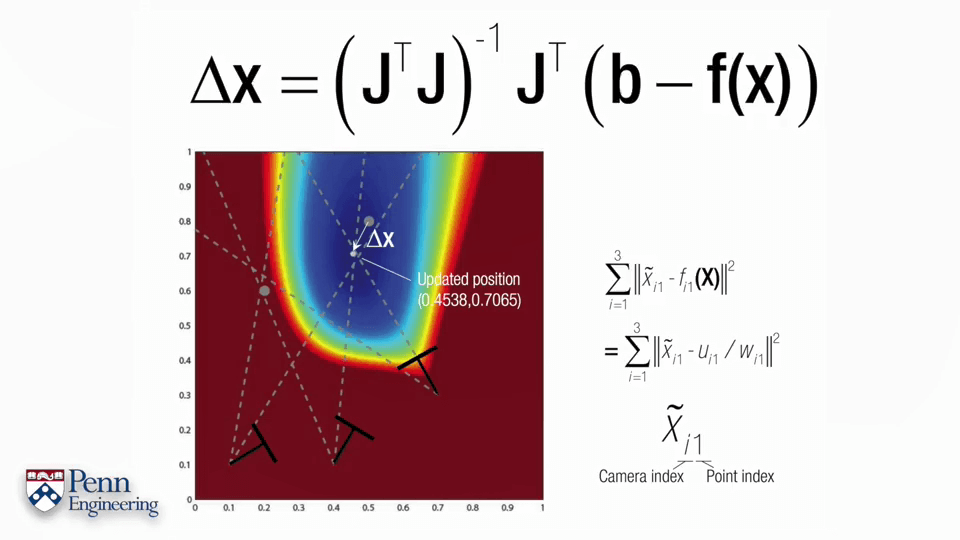
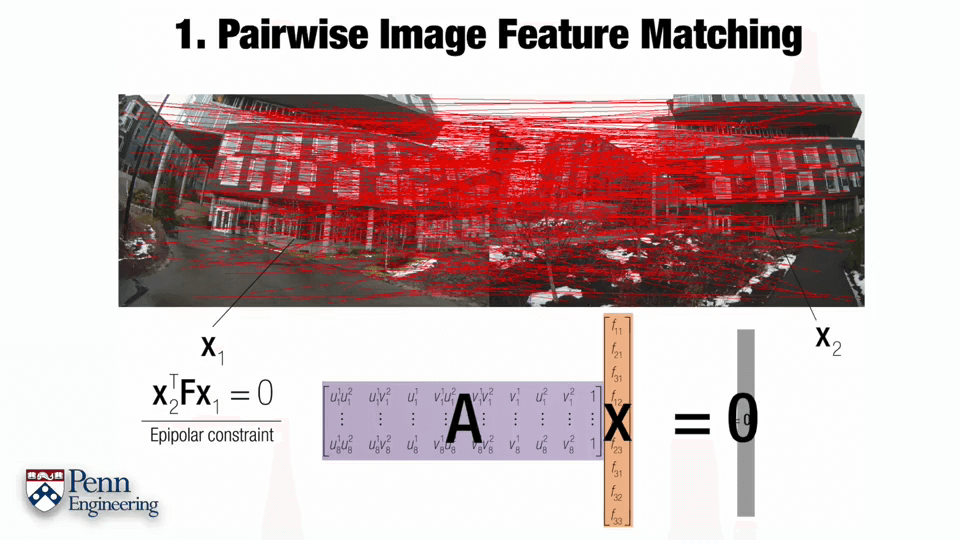
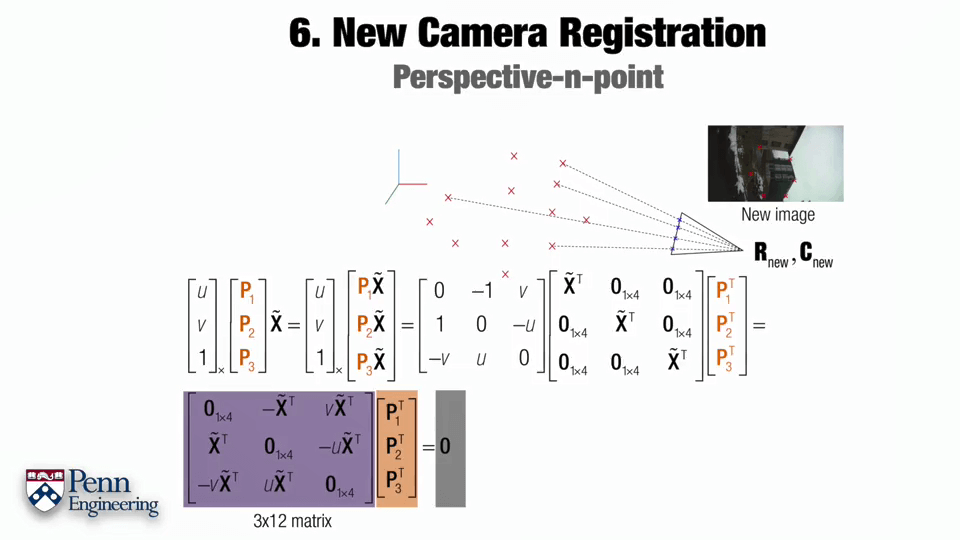
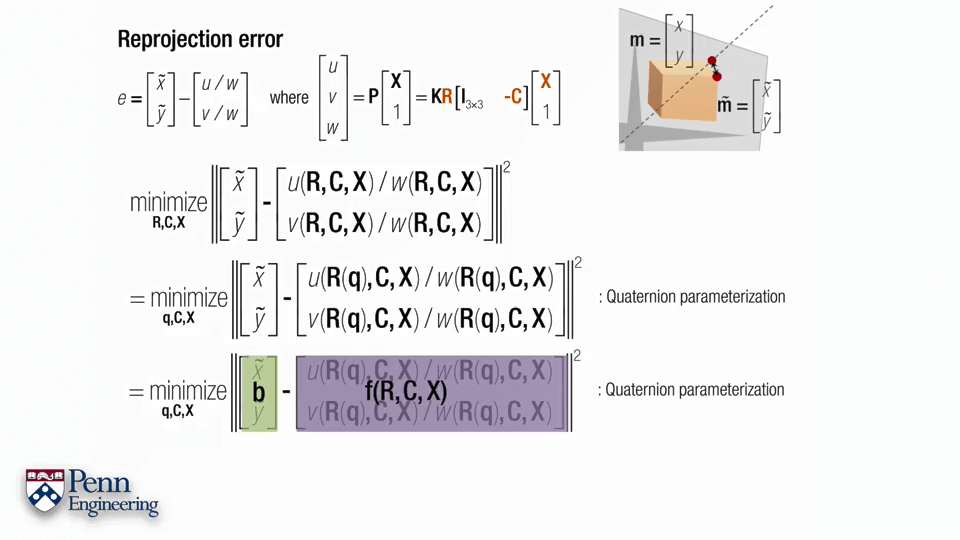 对于某个点,重投影误差可以如上图所示。x~、y~是我们在影像上的观测坐标,u、v、w则是根据估计的相机位姿算出来的该点坐标。这个式子中最复杂的也就是后半部分,也正是因为它导致了整个式子的非线性。更具体来说u、v、w的计算是非线性的,而u/w、v/w又是非线性的。为了后续方便,不妨将u、v、w写成关于R、C、X的函数形式,如第二行。进一步,旋转R可以参数化表达为四元数,可以写成第三行。以非线性最小二乘的形式可以看成b-f(R,C,X)的形式,如第四行。
对于某个点,重投影误差可以如上图所示。x~、y~是我们在影像上的观测坐标,u、v、w则是根据估计的相机位姿算出来的该点坐标。这个式子中最复杂的也就是后半部分,也正是因为它导致了整个式子的非线性。更具体来说u、v、w的计算是非线性的,而u/w、v/w又是非线性的。为了后续方便,不妨将u、v、w写成关于R、C、X的函数形式,如第二行。进一步,旋转R可以参数化表达为四元数,可以写成第三行。以非线性最小二乘的形式可以看成b-f(R,C,X)的形式,如第四行。
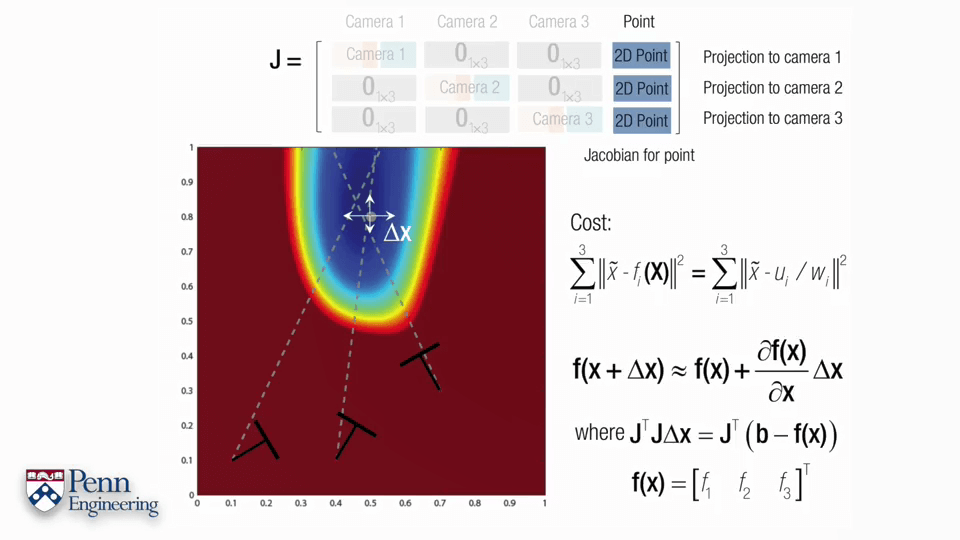
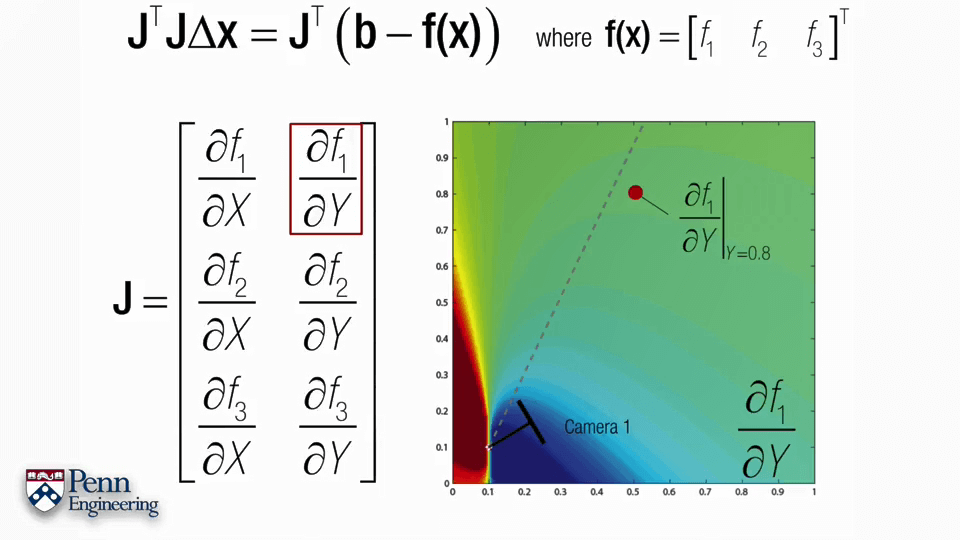
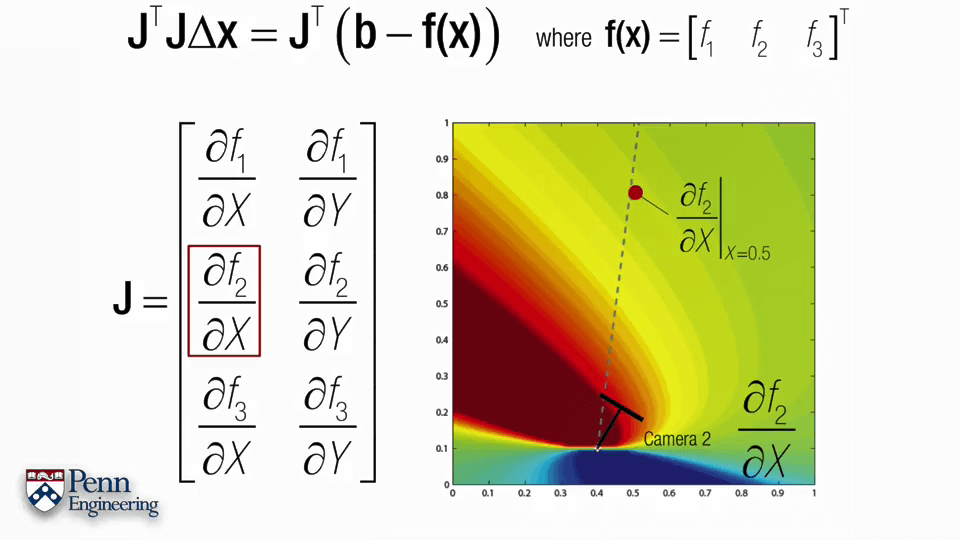
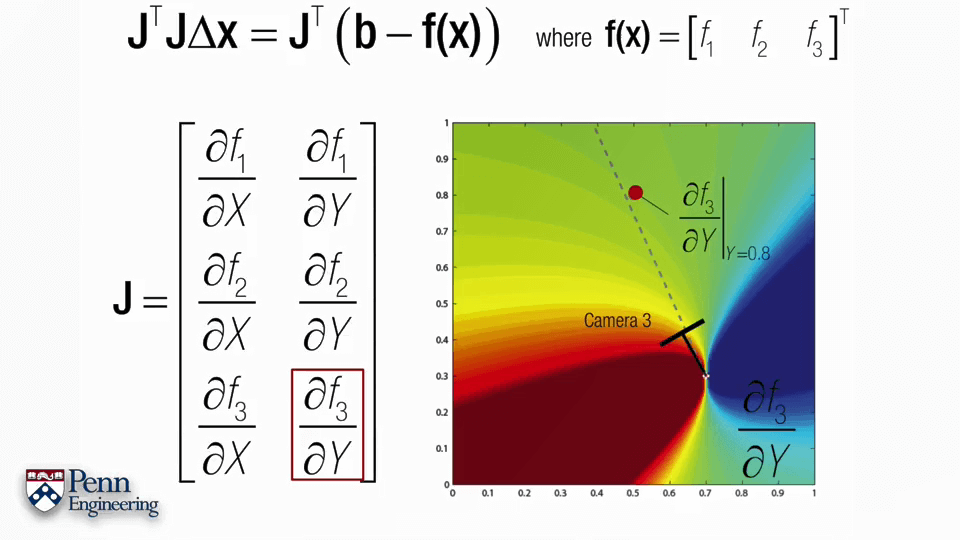
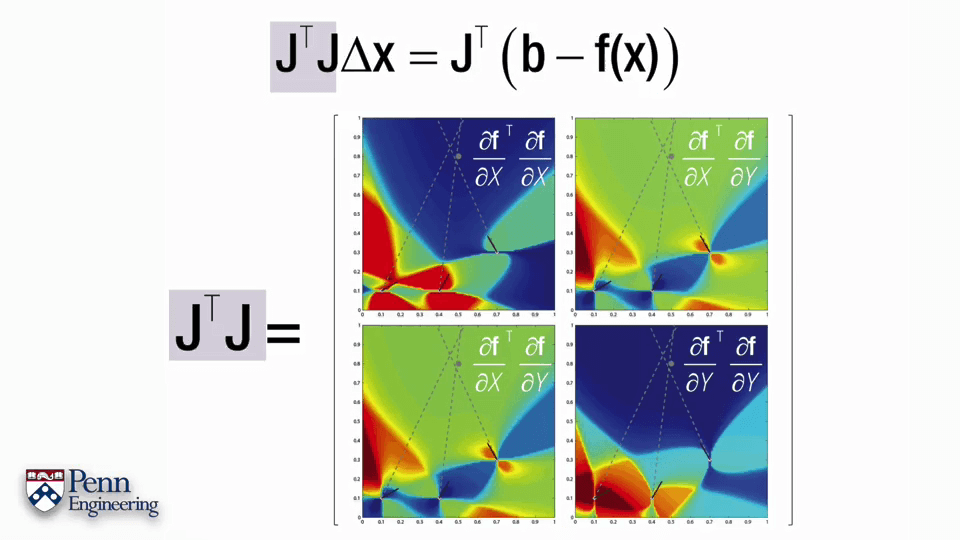
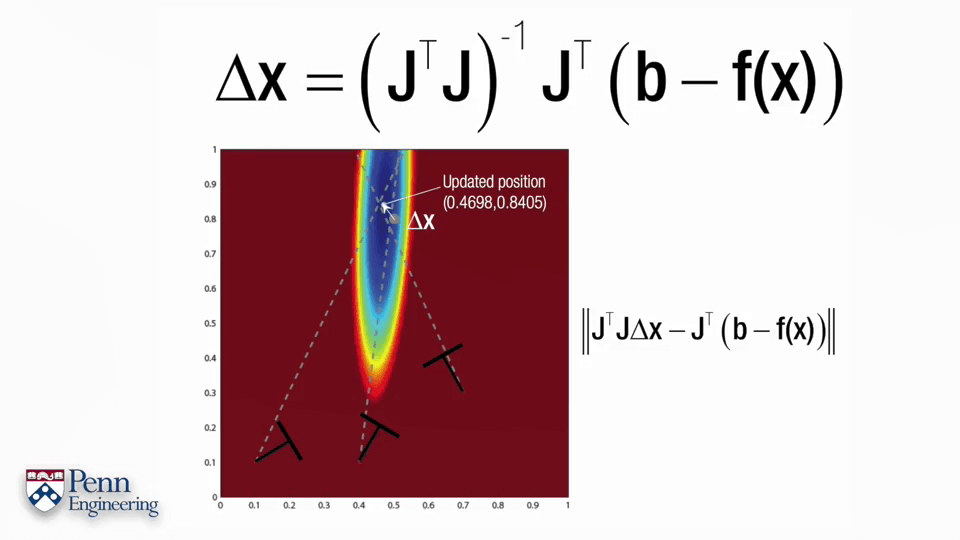
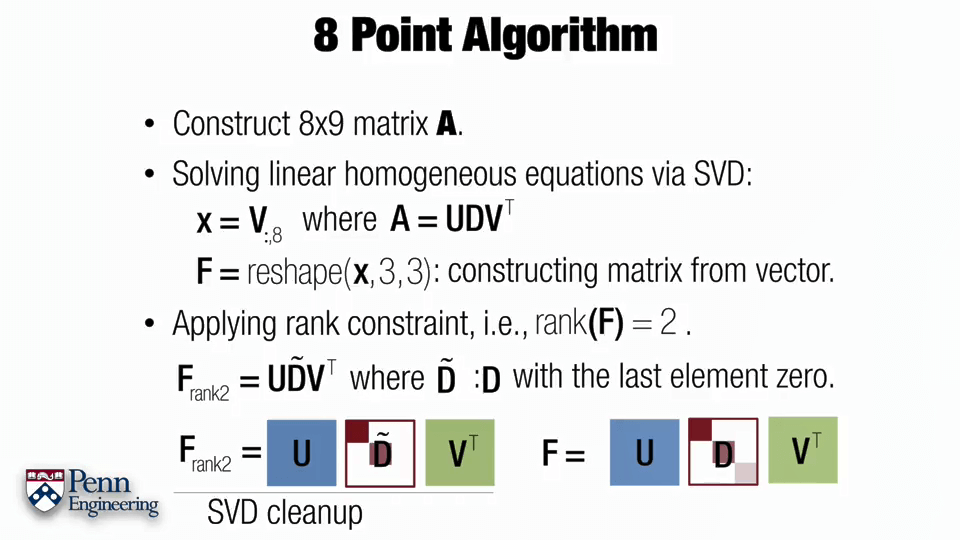
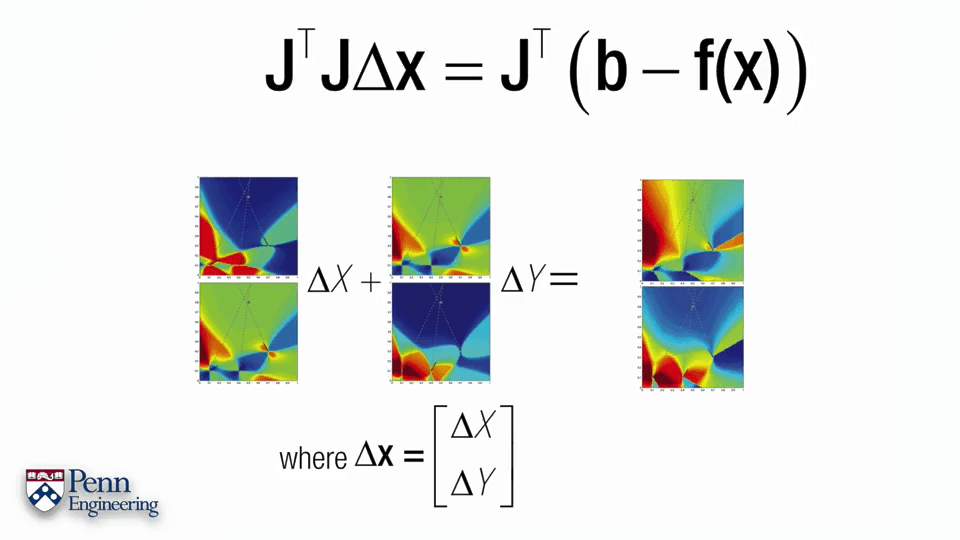
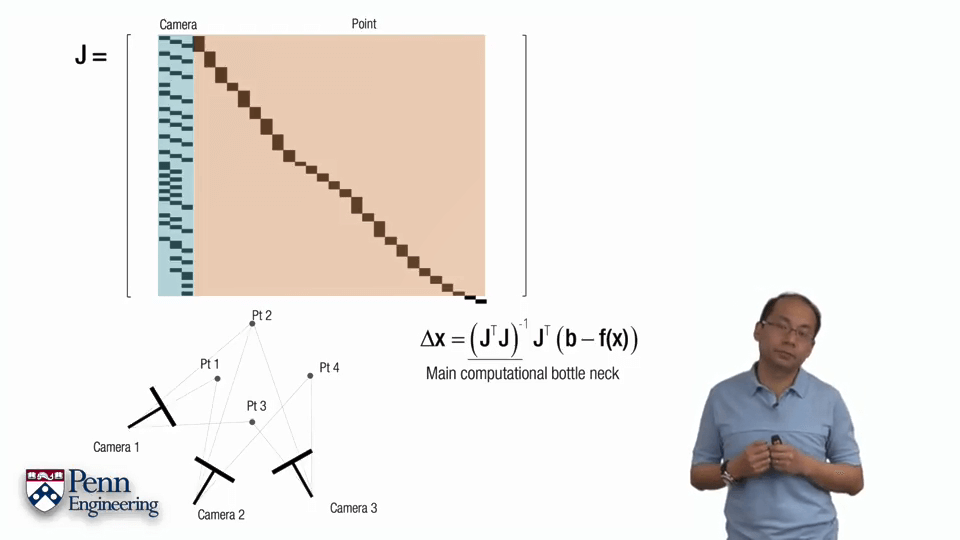
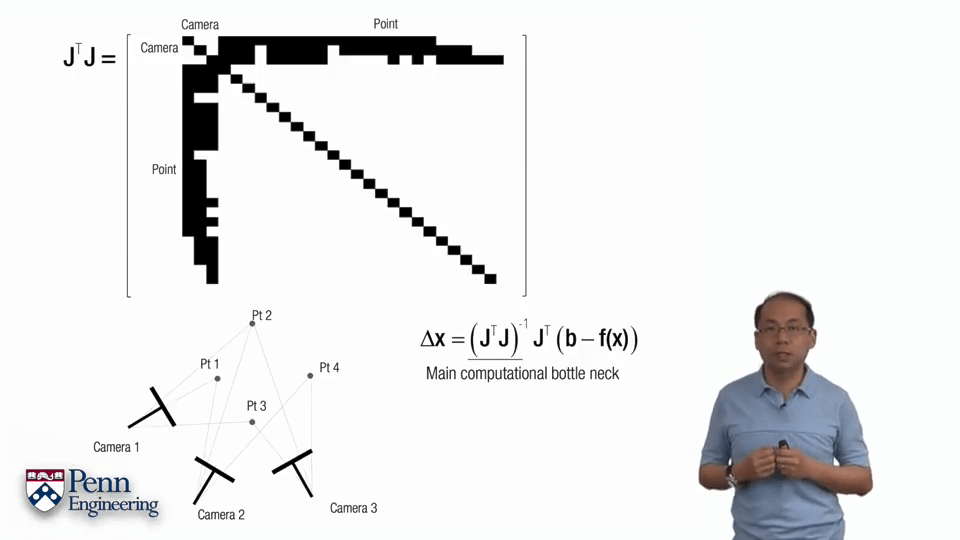
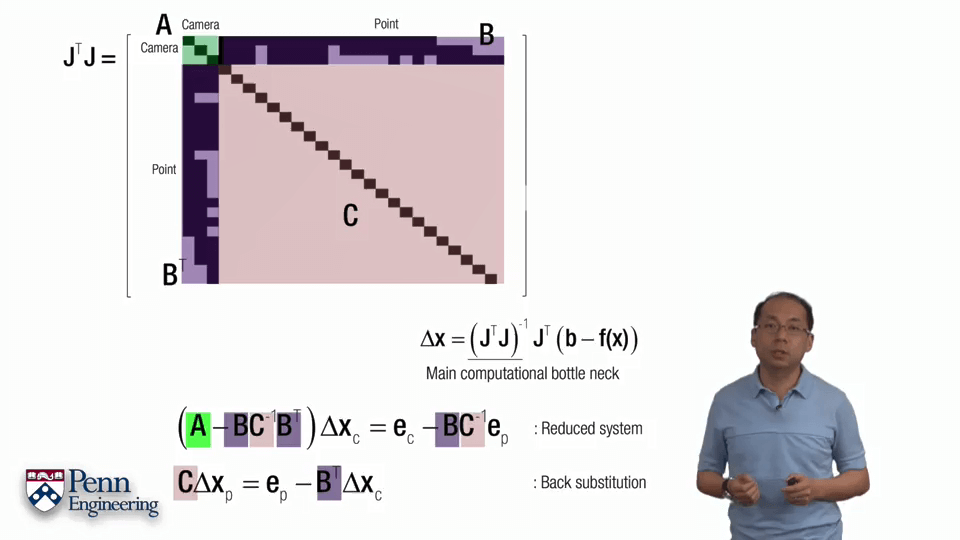
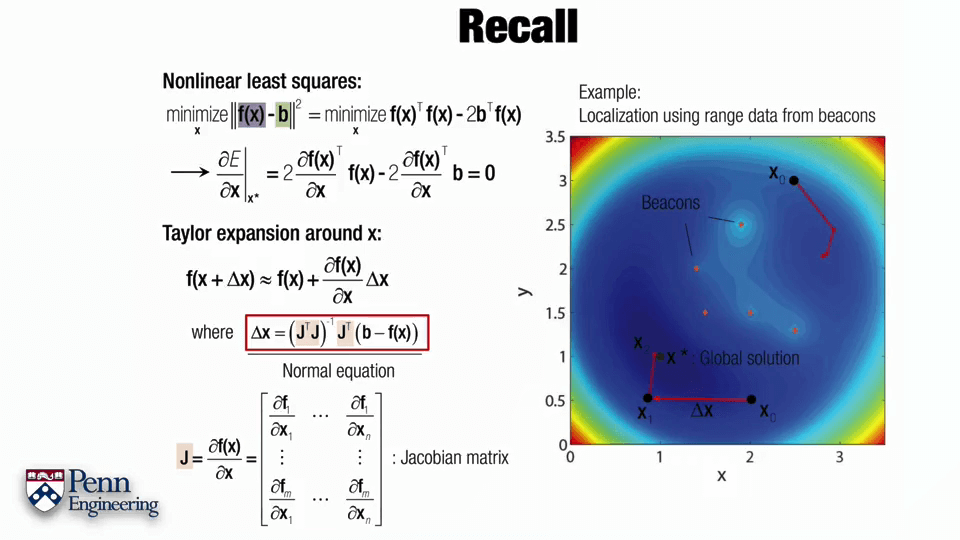 一个标准的非线性最小二乘问题如上图所示,主要分为两步。首先计算误差函数的导数,并让其为0。第二步是对函数进行泰勒展开。这里Δx的式子叫做normal equation,通过求解这个式子就可以获得Δx进而可以不断迭代,是非常重要的式子。可以看到normal equation包含两个内容,一个是雅可比矩阵J,一个是负的error function。某种程度上来说,求解normal equation就是求解雅可比矩阵J,求解出了雅可比矩阵J就可以得到normal equation,得到normal equation就可以得到Δx进而不断迭代。这里的J是雅可比矩阵,是一个m行n列的矩阵。对于每一个自变量x都有一列与其对应,对于每一个约束,都有一列与其对应。对于第i列,其元素是各个f对xi的偏导,对于第j行,每个元素是fj对于每个自变量的偏导。更直白地说,雅可比矩阵的行数代表观测个数,列数表示每次观测的变量的个数。
一个标准的非线性最小二乘问题如上图所示,主要分为两步。首先计算误差函数的导数,并让其为0。第二步是对函数进行泰勒展开。这里Δx的式子叫做normal equation,通过求解这个式子就可以获得Δx进而可以不断迭代,是非常重要的式子。可以看到normal equation包含两个内容,一个是雅可比矩阵J,一个是负的error function。某种程度上来说,求解normal equation就是求解雅可比矩阵J,求解出了雅可比矩阵J就可以得到normal equation,得到normal equation就可以得到Δx进而不断迭代。这里的J是雅可比矩阵,是一个m行n列的矩阵。对于每一个自变量x都有一列与其对应,对于每一个约束,都有一列与其对应。对于第i列,其元素是各个f对xi的偏导,对于第j行,每个元素是fj对于每个自变量的偏导。更直白地说,雅可比矩阵的行数代表观测个数,列数表示每次观测的变量的个数。
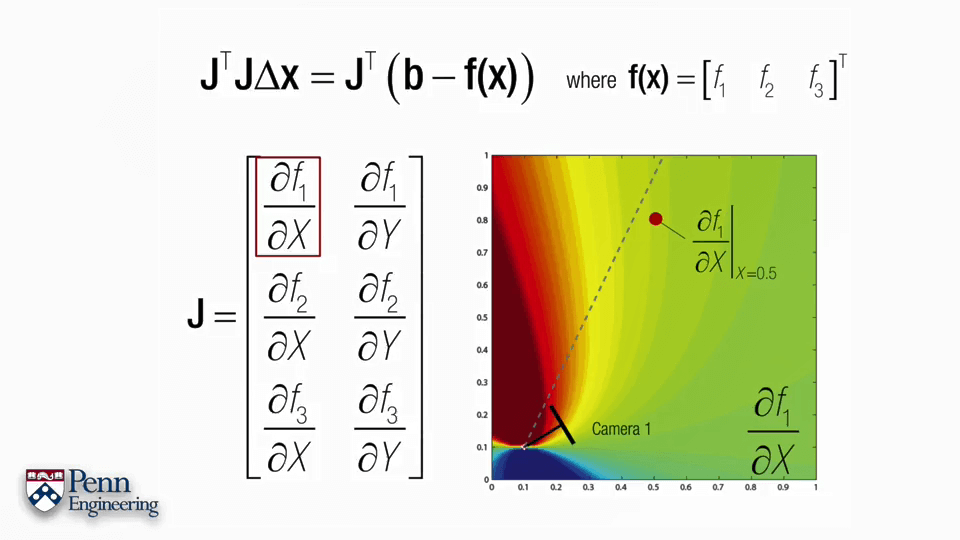
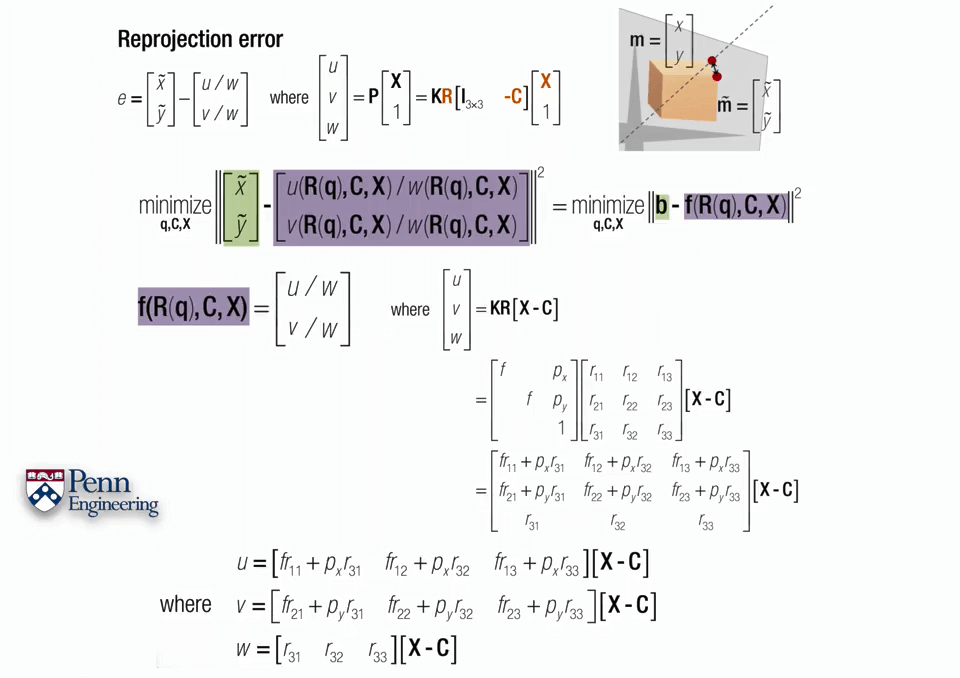 回到我们的重投影误差问题。正如刚刚说的雅可比矩阵的求法,是要对f(x)求偏导的,因此需要写出f(x)明确的形式。在这里f(x)是由u、v、w组成的,进一步将其写成关于自变量R、C、X的形式,便于后续求偏导。
回到我们的重投影误差问题。正如刚刚说的雅可比矩阵的求法,是要对f(x)求偏导的,因此需要写出f(x)明确的形式。在这里f(x)是由u、v、w组成的,进一步将其写成关于自变量R、C、X的形式,便于后续求偏导。
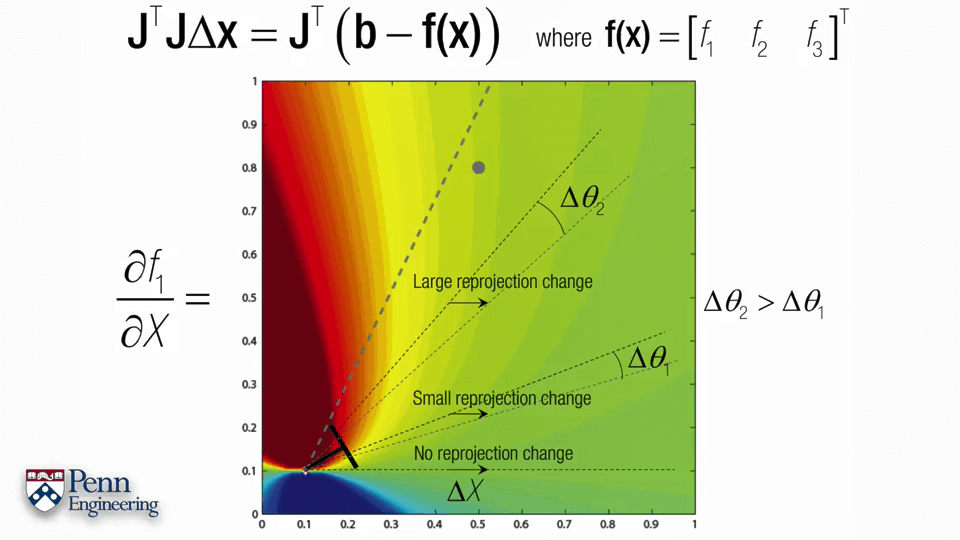
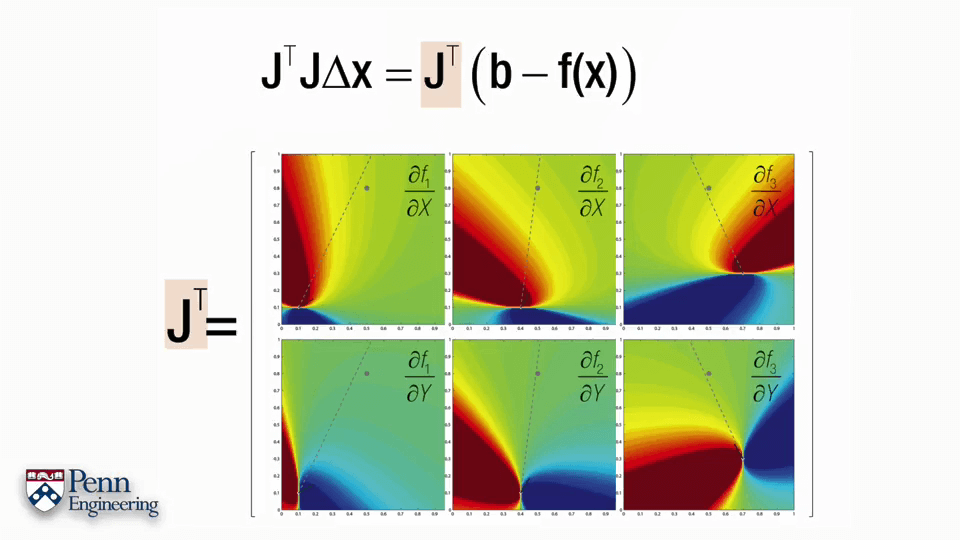
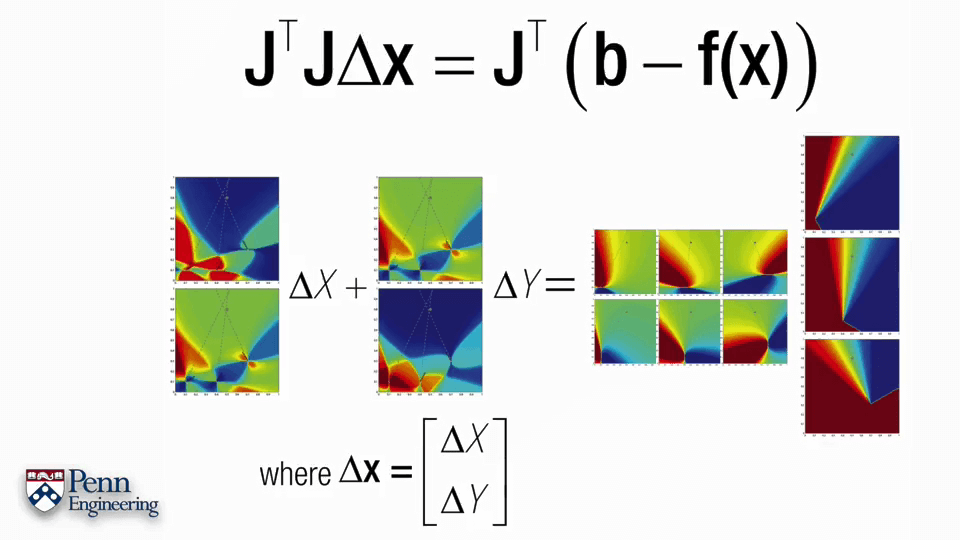
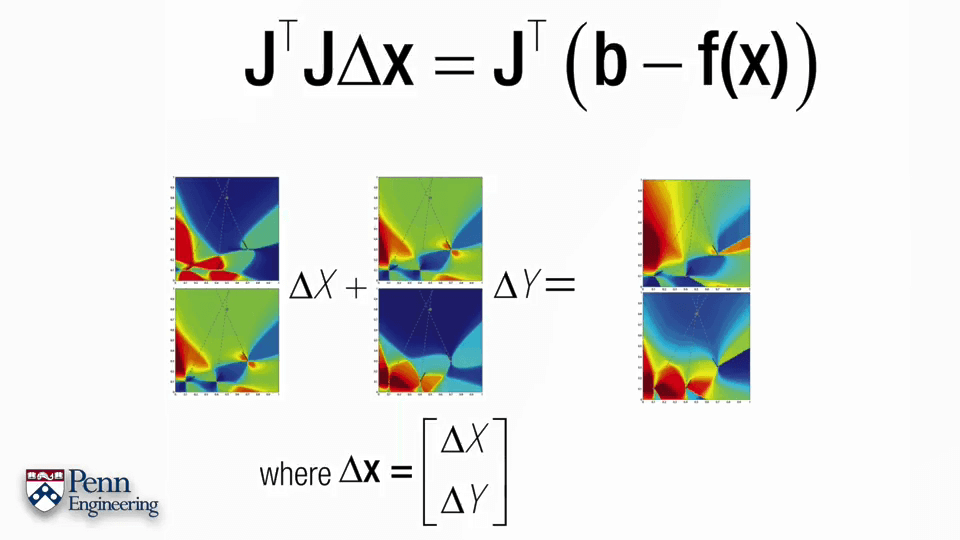
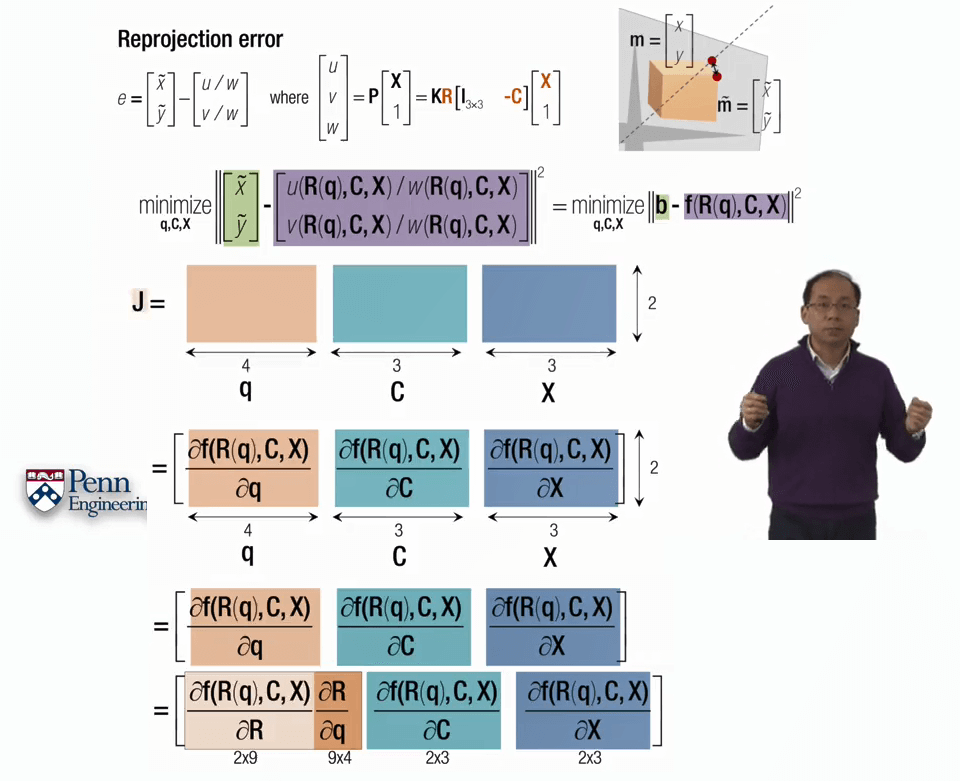 有了f(x),下一步的关键问题就是雅可比矩阵J该怎么求。正如上面提到的雅可比矩阵的特性,雅可比矩阵的每一列与我们正在搜寻的未知变量有关,每一列表示对一个变量的偏导,列数等于变量个数,而f(x)又是关于R、C、X的变量,所以不妨将雅可比矩阵J拆分成R、C、X三部分。同时别忘了我们用四元数表示R,这样根据求导的链式法则就可以获得J的三部分q、C、X,q是四元数,包含4个变量,C和X都是三维坐标,包含3个变量,因此J总共包含4+3+3=10列。而我们在影像上的观测是x~、y~,有两个变量,因此J的行数为2。
有了f(x),下一步的关键问题就是雅可比矩阵J该怎么求。正如上面提到的雅可比矩阵的特性,雅可比矩阵的每一列与我们正在搜寻的未知变量有关,每一列表示对一个变量的偏导,列数等于变量个数,而f(x)又是关于R、C、X的变量,所以不妨将雅可比矩阵J拆分成R、C、X三部分。同时别忘了我们用四元数表示R,这样根据求导的链式法则就可以获得J的三部分q、C、X,q是四元数,包含4个变量,C和X都是三维坐标,包含3个变量,因此J总共包含4+3+3=10列。而我们在影像上的观测是x~、y~,有两个变量,因此J的行数为2。
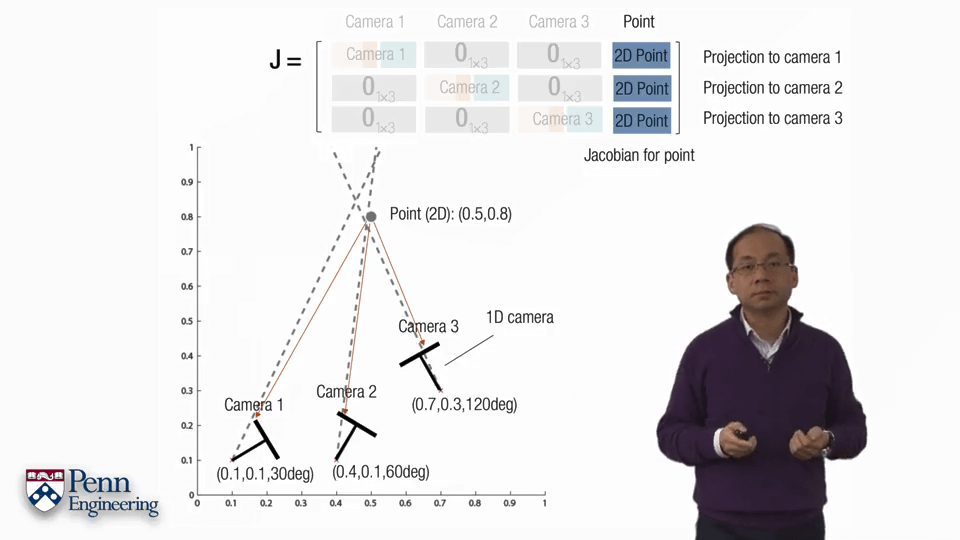
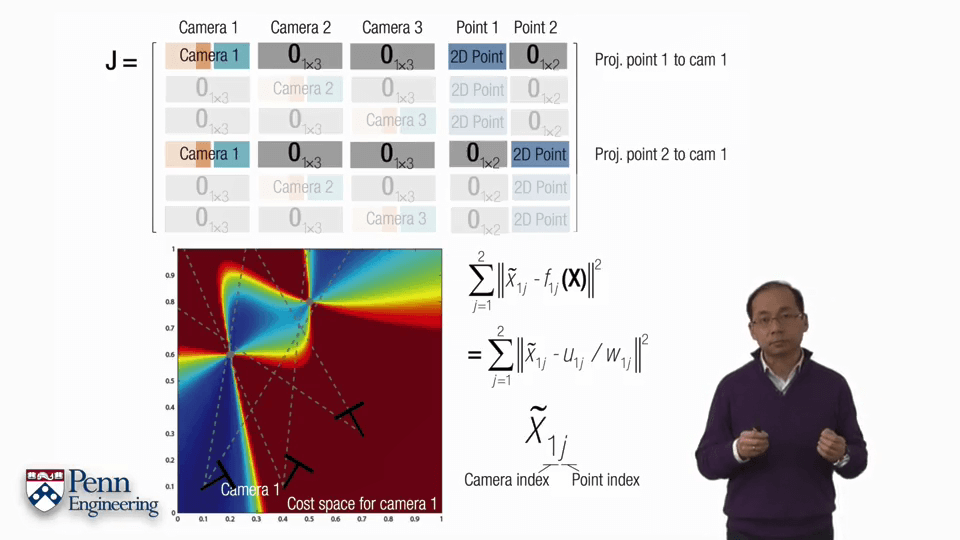
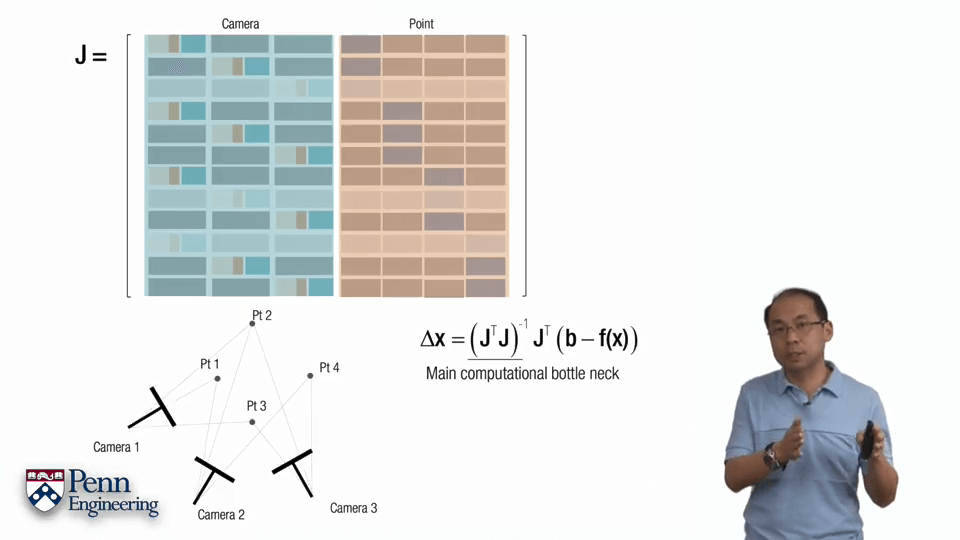
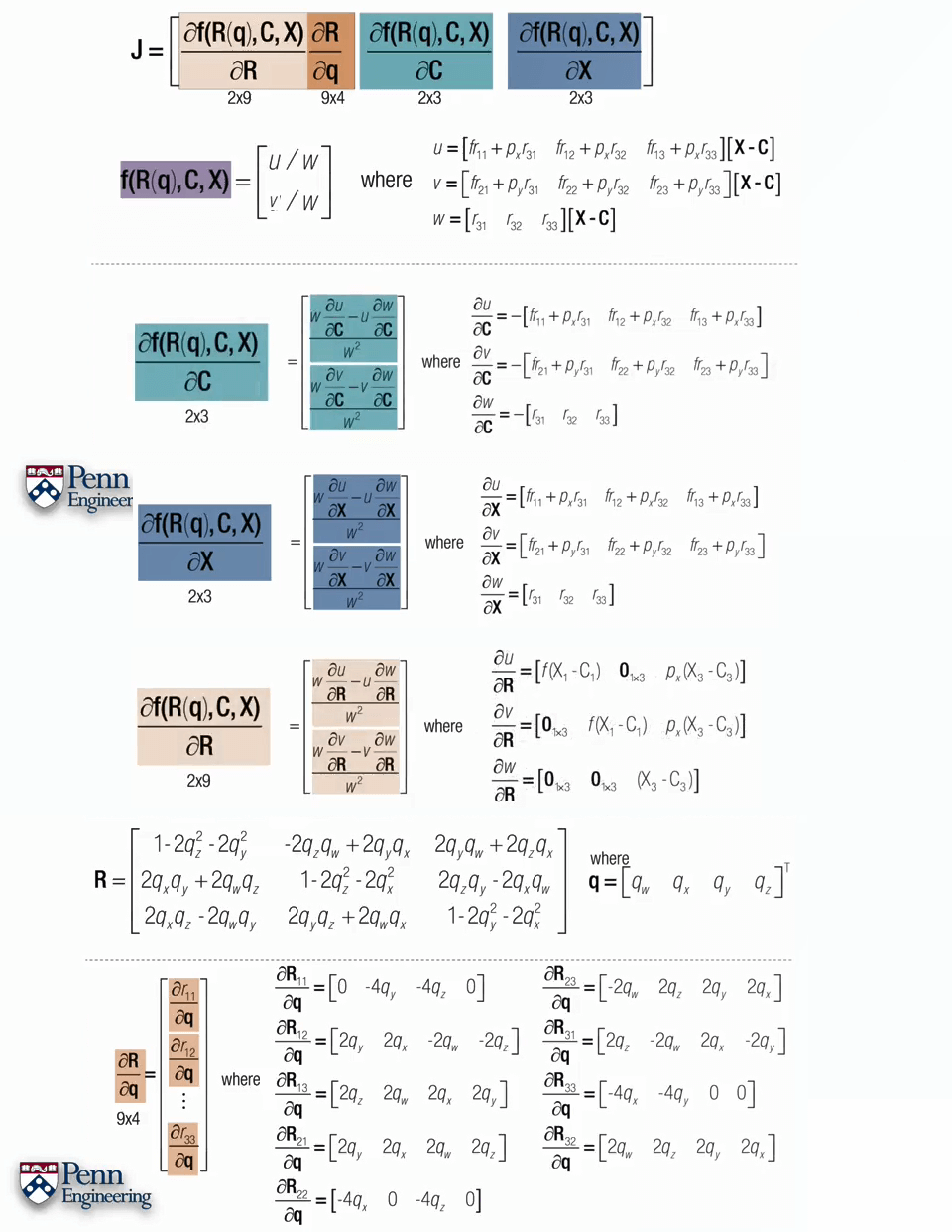 因此我们可以依次获得各部分的矩阵,最后组成一个完整的雅可比矩阵J。对于一个点,可以获得一个2行10列的雅可比矩阵。而对于n个点,可以以此类推获得2n行10列的大的矩阵。
因此我们可以依次获得各部分的矩阵,最后组成一个完整的雅可比矩阵J。对于一个点,可以获得一个2行10列的雅可比矩阵。而对于n个点,可以以此类推获得2n行10列的大的矩阵。
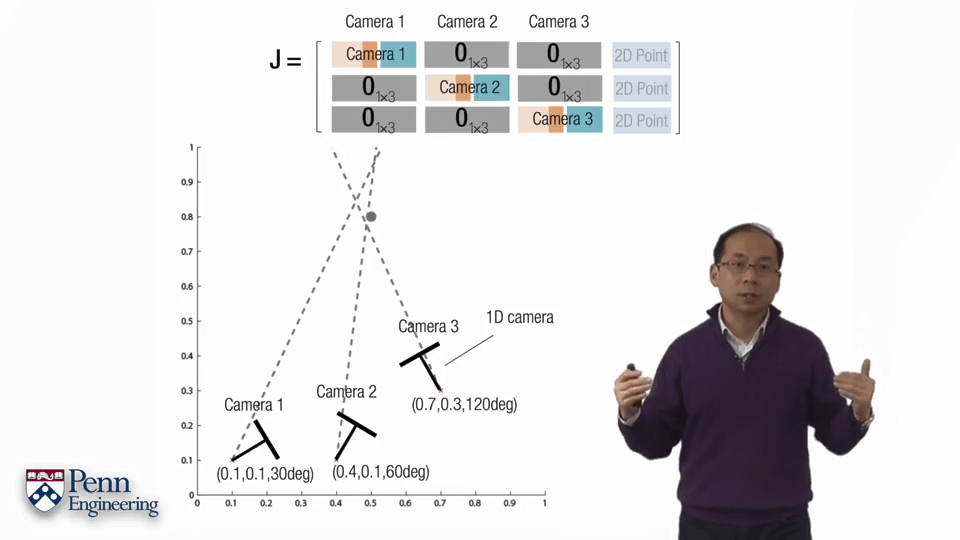
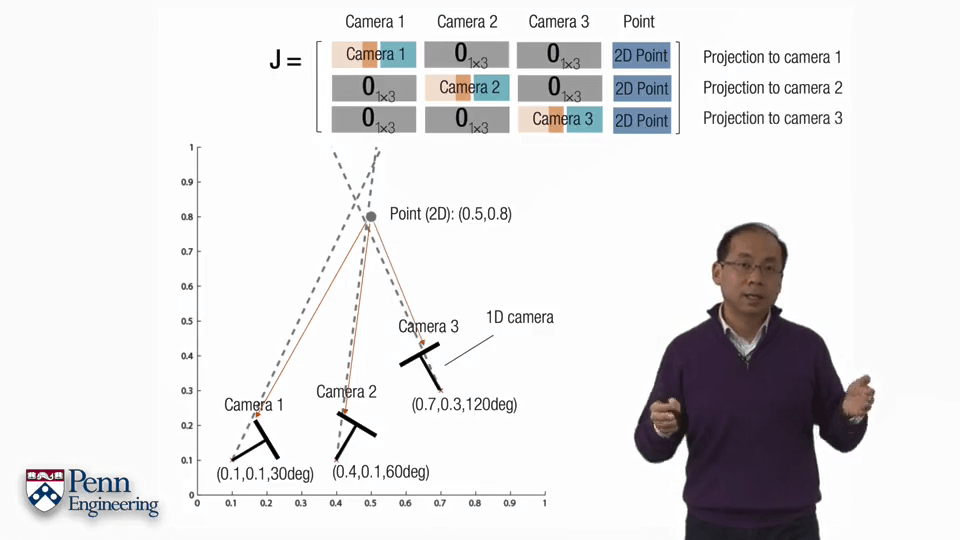
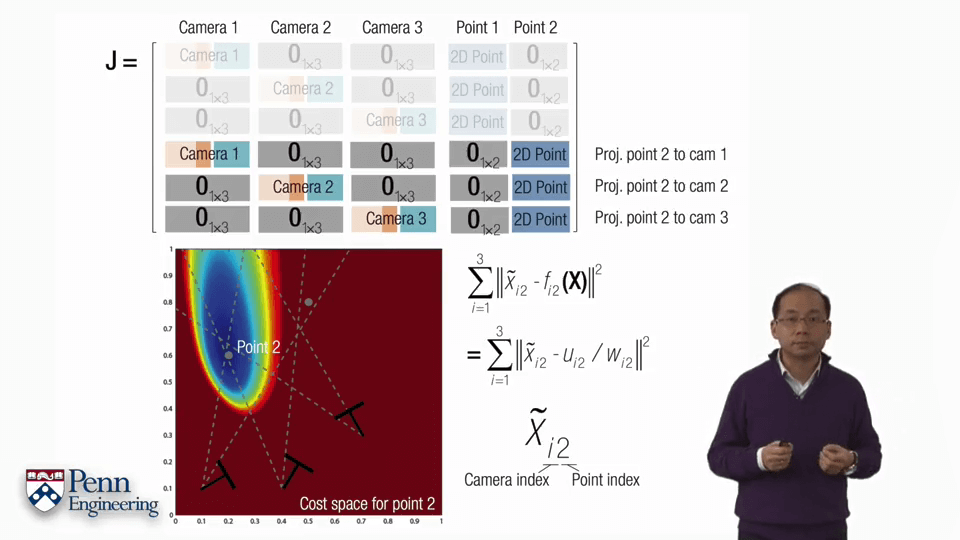
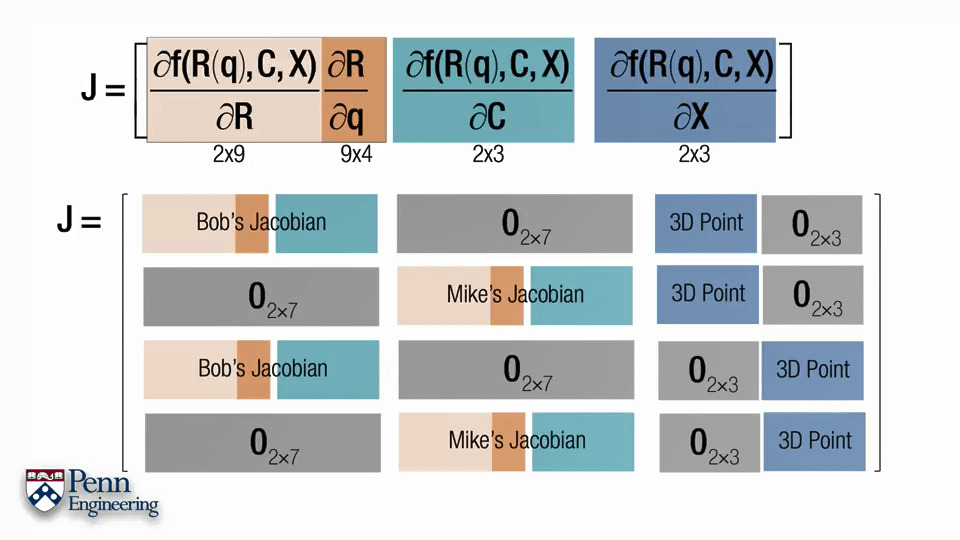
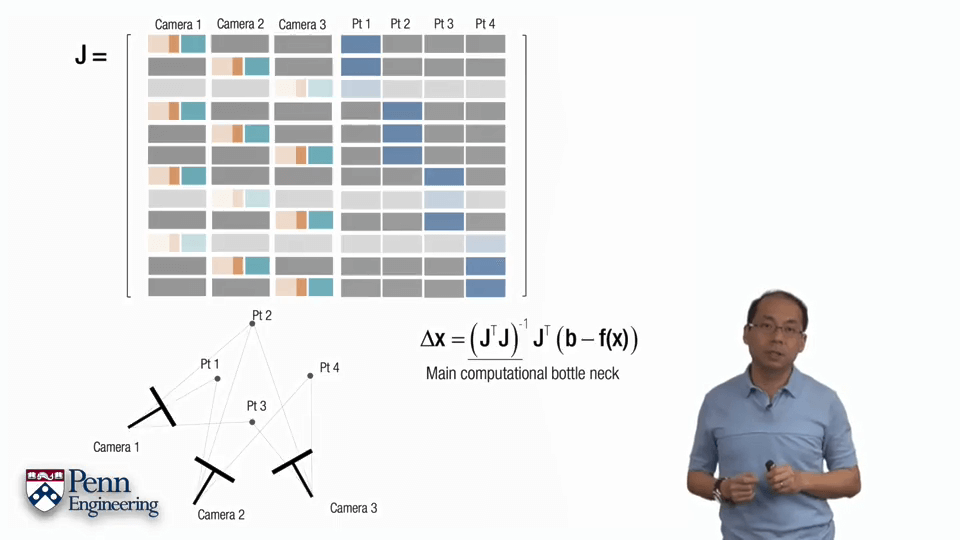
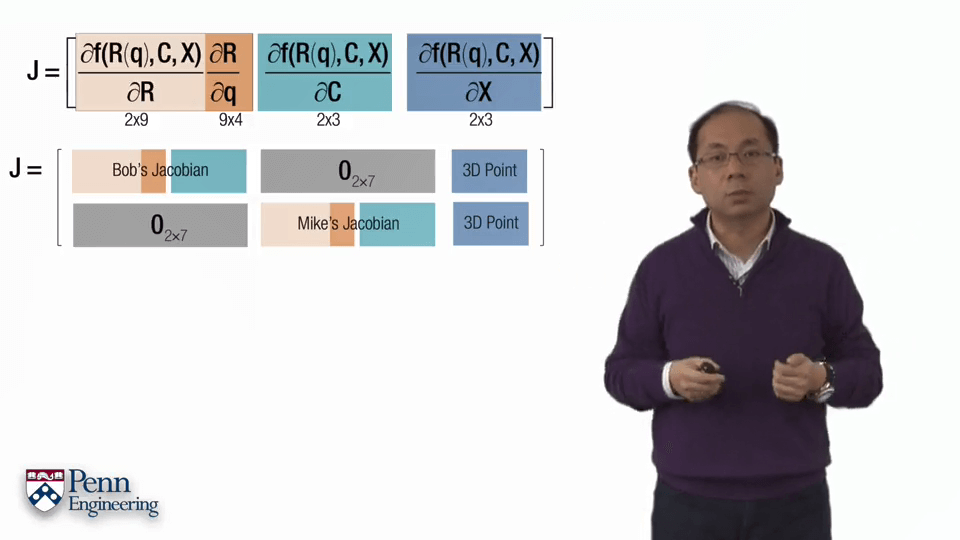 但上面所说针对的是一个影像中的一个点的情况,对于多帧的情况就会有所不同。可以按照上图中的形式拼接多个不同帧的雅可比矩阵。因为各帧之间的观测并不会互相干扰,因此空白部分全部为0。对于某个在两帧中都观测到的点,每一帧中的雅可比矩阵是2行17列,拼起来就是4行17列的大的矩阵。
但上面所说针对的是一个影像中的一个点的情况,对于多帧的情况就会有所不同。可以按照上图中的形式拼接多个不同帧的雅可比矩阵。因为各帧之间的观测并不会互相干扰,因此空白部分全部为0。对于某个在两帧中都观测到的点,每一帧中的雅可比矩阵是2行17列,拼起来就是4行17列的大的矩阵。
3.Bundle Adjustment Part2
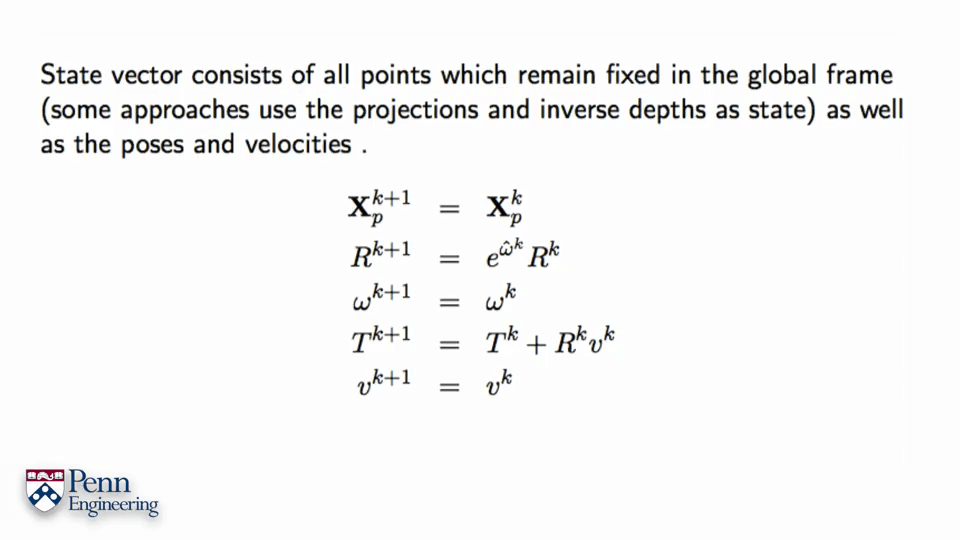
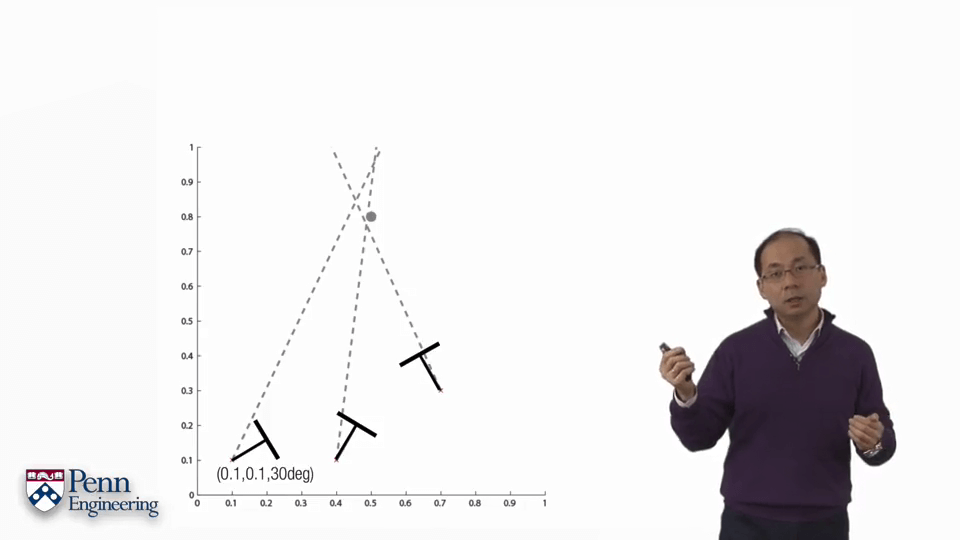
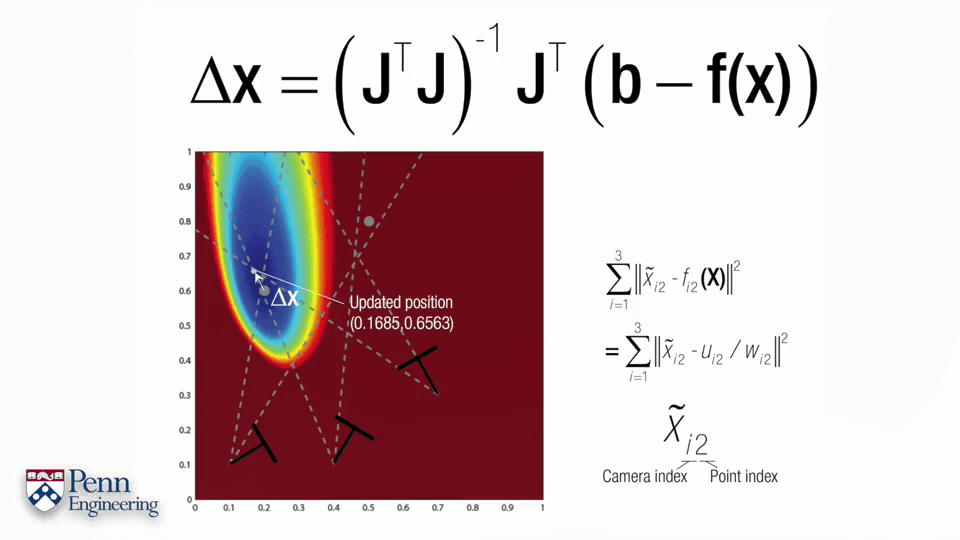
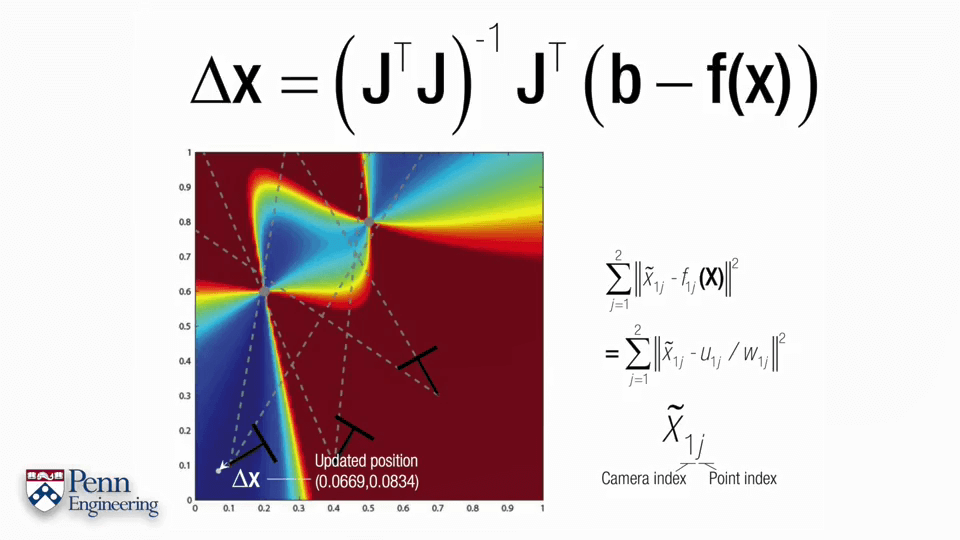
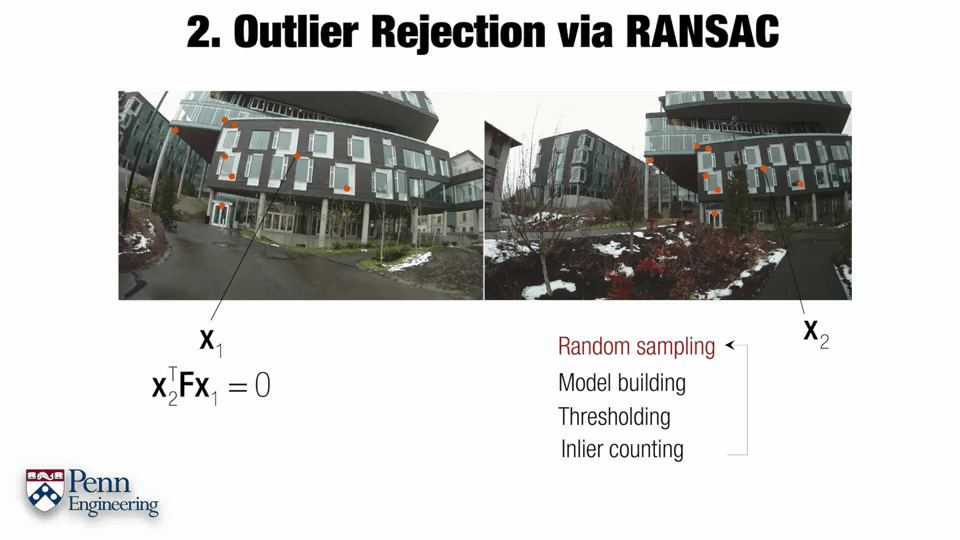
下面以一个例子介绍一下BA的过程。
4.Bundle Adjustment Part3


本文作者原创,未经许可不得转载,谢谢配合
