实验室这两天买了个Intel最新的Realsense D400系列的传感器D405。它是Intel在2022年3月发布的新品,如下。
 主打定位是短距双目深度测量,对于一些近景计算机视觉应用,号称可以达到亚毫米级精度。目前网上好像对它的测评还比较少,所以本篇博客主要是该设备的开箱使用以及简单介绍。
主打定位是短距双目深度测量,对于一些近景计算机视觉应用,号称可以达到亚毫米级精度。目前网上好像对它的测评还比较少,所以本篇博客主要是该设备的开箱使用以及简单介绍。
1.开箱
拿到设备的包装如下,很小的一块。
 从盒子中拿出本体,正、反、侧面如下。
从盒子中拿出本体,正、反、侧面如下。
 正面是Realsense系列一贯的黑色面板。
正面是Realsense系列一贯的黑色面板。
 反面也是Realsense系列一贯的银色磨砂背板。
反面也是Realsense系列一贯的银色磨砂背板。
 需要注意的是,这次D405的接口不再是Type-C了,而是采用了类似移动硬盘的接口,所以没办法直接拿Type-C的线连接,好在官方随机送了一条数据线,如下所示。
需要注意的是,这次D405的接口不再是Type-C了,而是采用了类似移动硬盘的接口,所以没办法直接拿Type-C的线连接,好在官方随机送了一条数据线,如下所示。
不得不说,D405真的很小。可能从官方宣传图上看不太出来,只有实际拿到手上才会有比较直观的感觉。如下图是D405和普通校园卡的大小对比,基本只有校园卡的一半大。
 最后,摆一张我手边的Realsense系列全家福:D435i、L515、D405。
最后,摆一张我手边的Realsense系列全家福:D435i、L515、D405。
 可以看到,D405比L515还要再小一圈。当然了,由于这么小的尺寸,而且又是双目深度相机,所以不可避免就会导致深度测量范围的缩小(在后面也会提到)。但D405这个产品的定位就是近景深度相机,所以从这个角度而言,这并不是它的缺点。
可以看到,D405比L515还要再小一圈。当然了,由于这么小的尺寸,而且又是双目深度相机,所以不可避免就会导致深度测量范围的缩小(在后面也会提到)。但D405这个产品的定位就是近景深度相机,所以从这个角度而言,这并不是它的缺点。
2.设备参数
官方产品宣传页是这里,产品参数文件点击下载。这里,我们首先列举一些参数,然后从上面提到的文档中截取几个参数对比表格以及一些比较有用的信息,方便更好了解设备。
2.1 概要参数
2.1.1 深度相机相关参数
- 深度理想量程范围:7cm - 50cm
- 曝光方式:全局快门
- 深度测量方式:双目立体
- 深度视场:87°(水平)×58°(竖直)
- 最小深度距离:7cm @ 480p
- 深度输出分辨率:至多1280×720
- 深度测量精度:±2% at 50cm
2.1.2 RGB相机相关参数
- 成像方式:左相机传感器
- 影像视场:87°(水平)×58°(竖直)
- RGB影像分辨率:1280×720
- RGB影像帧率:至多90fps
2.1.3 其它硬件参数
- 相机模块:Intel RealSense Module D401
- 视觉处理板:Intel RealSense Vision Processor D4 Board v4
- 大小:42mm(长) × 42mm(宽) × 23mm(高)
- USB连接方式:USB2 & USB3.1
2.2 产品参数文件详细指标
2.2.1 D405与其它D400产品构成对比
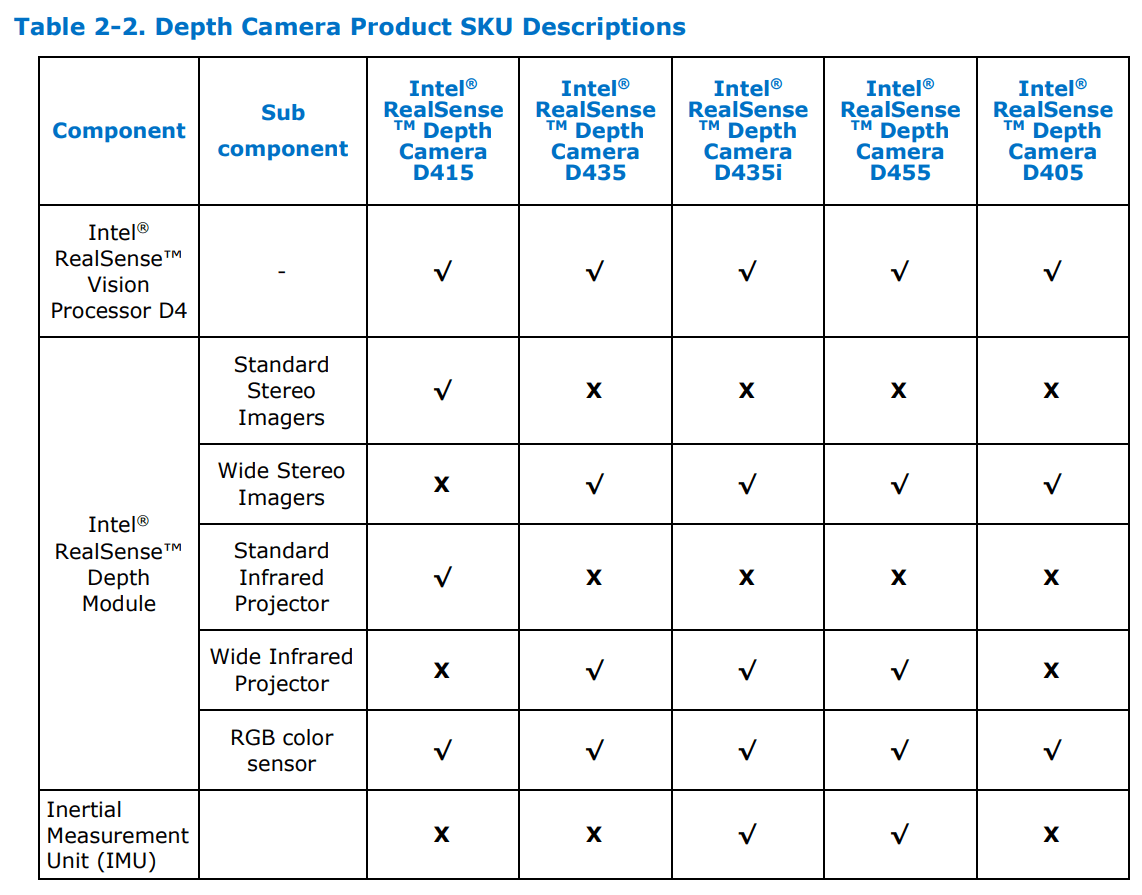 可以看到,D400系列采用了一致的处理芯片。而相比于我们熟悉的D435i,D405没有红外发射器,而且没有IMU模块。所以也可以说,D405就是一个纯RGB视觉的深度相机。
可以看到,D400系列采用了一致的处理芯片。而相比于我们熟悉的D435i,D405没有红外发射器,而且没有IMU模块。所以也可以说,D405就是一个纯RGB视觉的深度相机。
2.2.2 D405与其它D400产品性能对比
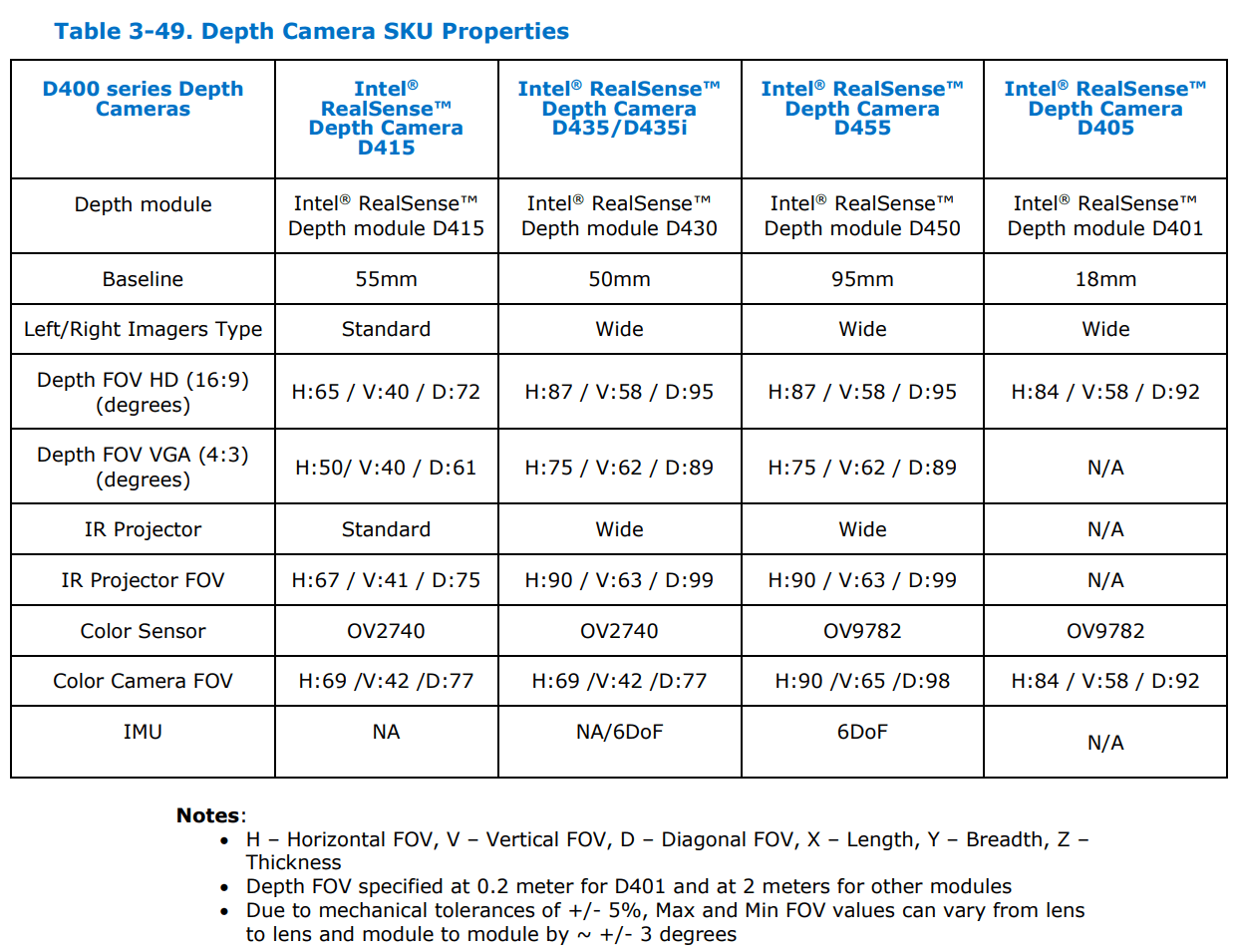 上图展示了D405与其它D400系列产品的相关参数。可以看到D405的双目基线为18mm,D435i的双目基线为50mm。两者的深度视场类似,但D405没有红外发射器。彩色相机部分,D435i采用OV2740,D405采用9782。D405的彩色相机相比于D435i有更大的视场角。D435i采用的深度模块型号是D430,D405采用的深度模块是D401。
上图展示了D405与其它D400系列产品的相关参数。可以看到D405的双目基线为18mm,D435i的双目基线为50mm。两者的深度视场类似,但D405没有红外发射器。彩色相机部分,D435i采用OV2740,D405采用9782。D405的彩色相机相比于D435i有更大的视场角。D435i采用的深度模块型号是D430,D405采用的深度模块是D401。
2.2.3 D405接口的详细描述
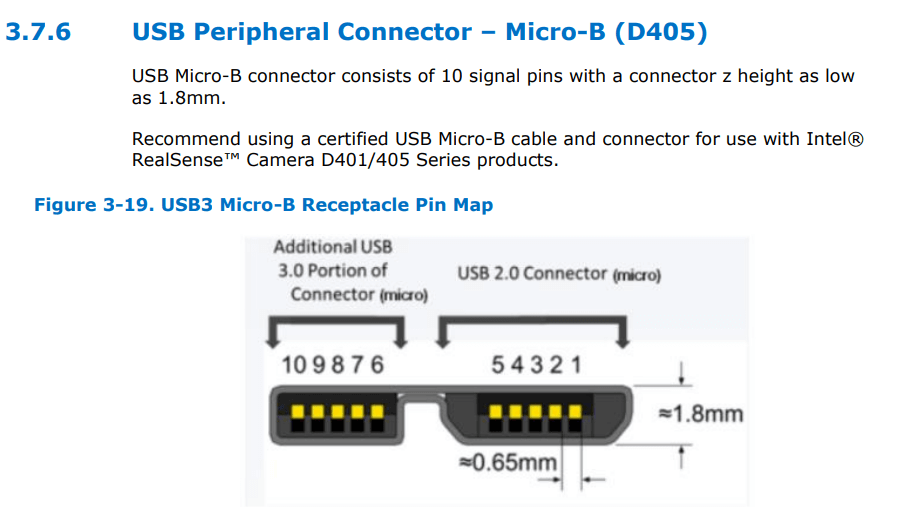 如上图所示,D405采用的是Micro-B USB接口,类似于移动硬盘的接口,所以需要专用的数据线。
如上图所示,D405采用的是Micro-B USB接口,类似于移动硬盘的接口,所以需要专用的数据线。
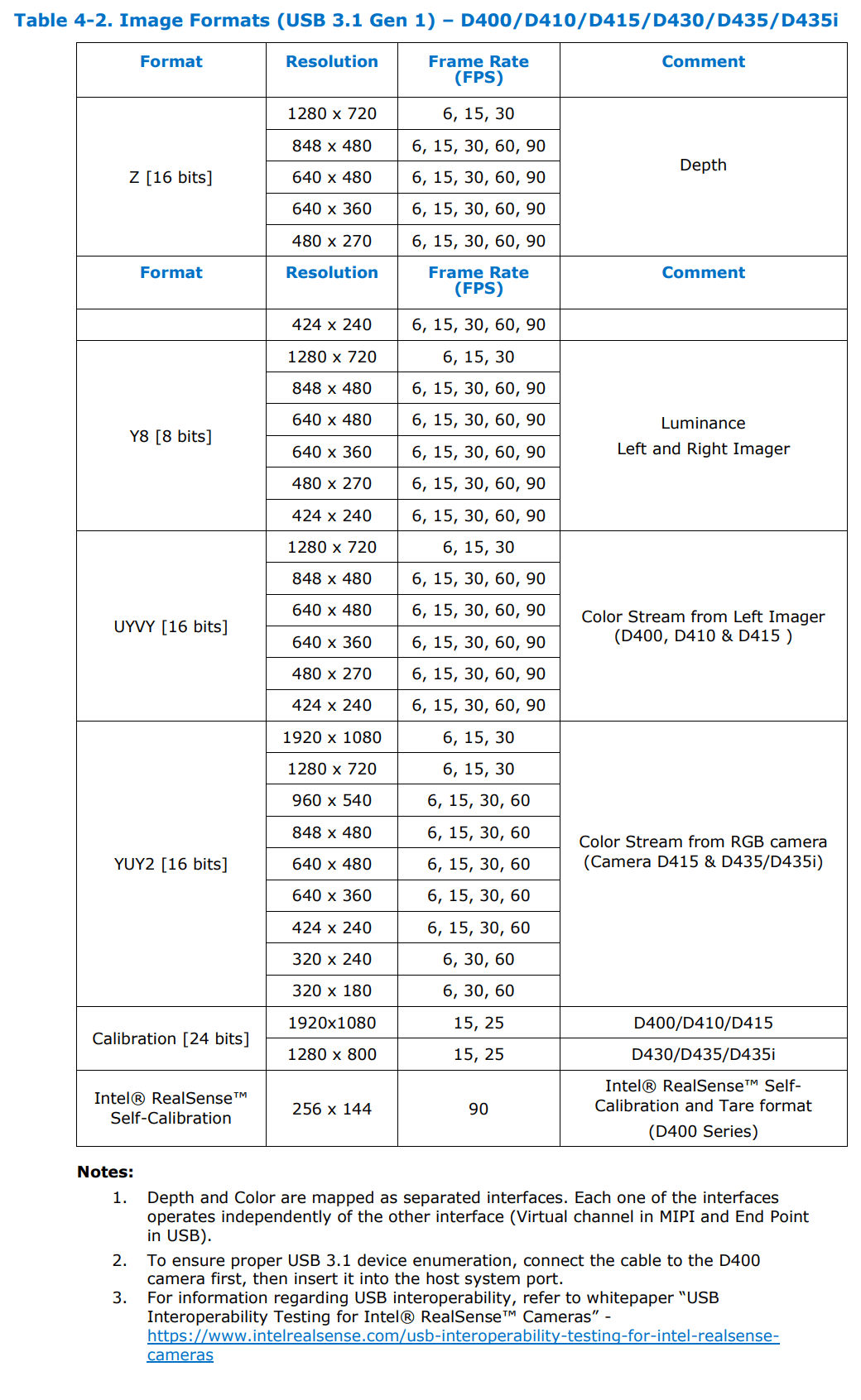
2.2.4 D405在USB3.1模式下支持的输出格式
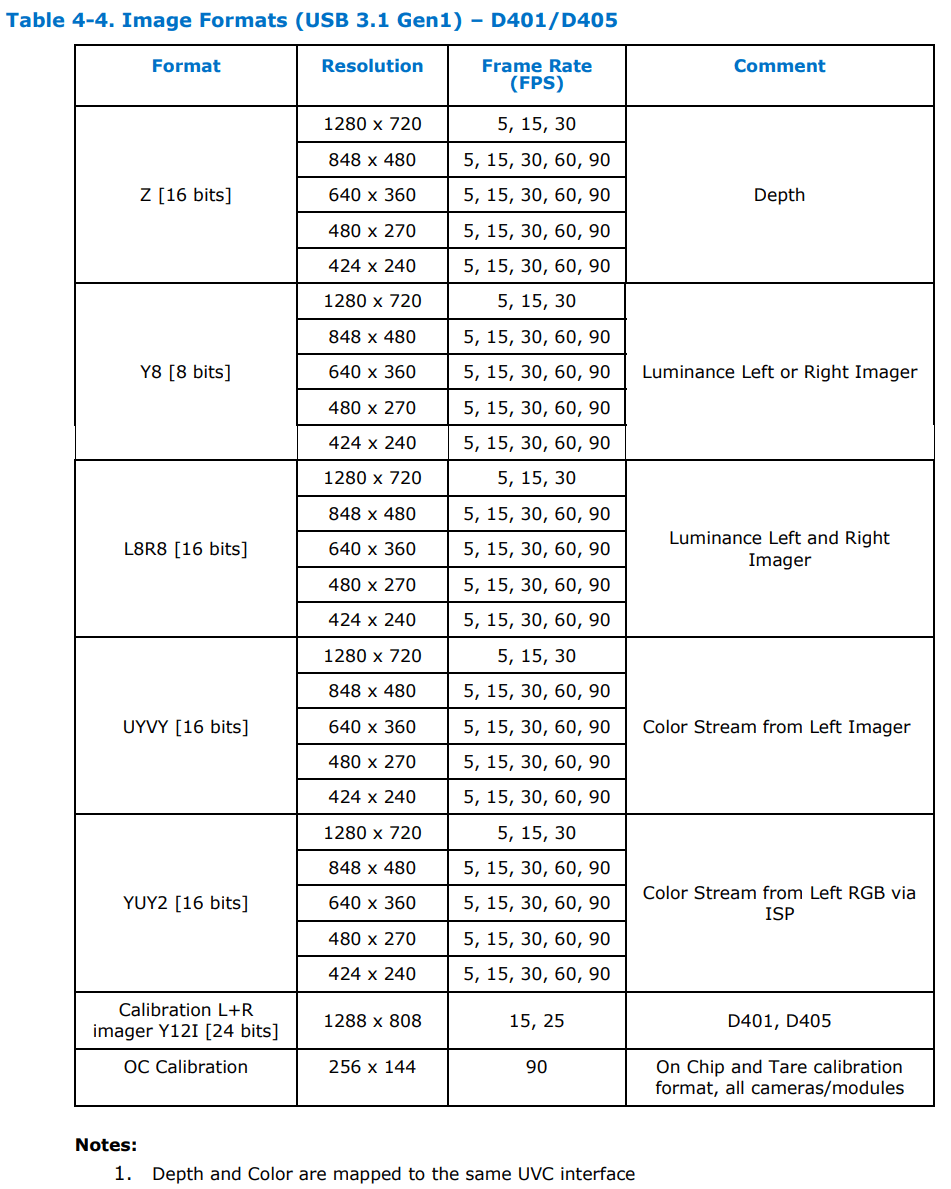 上图展示了D405在USB3.1条件下可以输出的数据格式组合,之后有不清楚的查这个表即可。可以看到,深度图像最高支持1280×720@30fps的输出。这里为了对比方便,也列出D435i支持的数据输出,如下。
上图展示了D405在USB3.1条件下可以输出的数据格式组合,之后有不清楚的查这个表即可。可以看到,深度图像最高支持1280×720@30fps的输出。这里为了对比方便,也列出D435i支持的数据输出,如下。
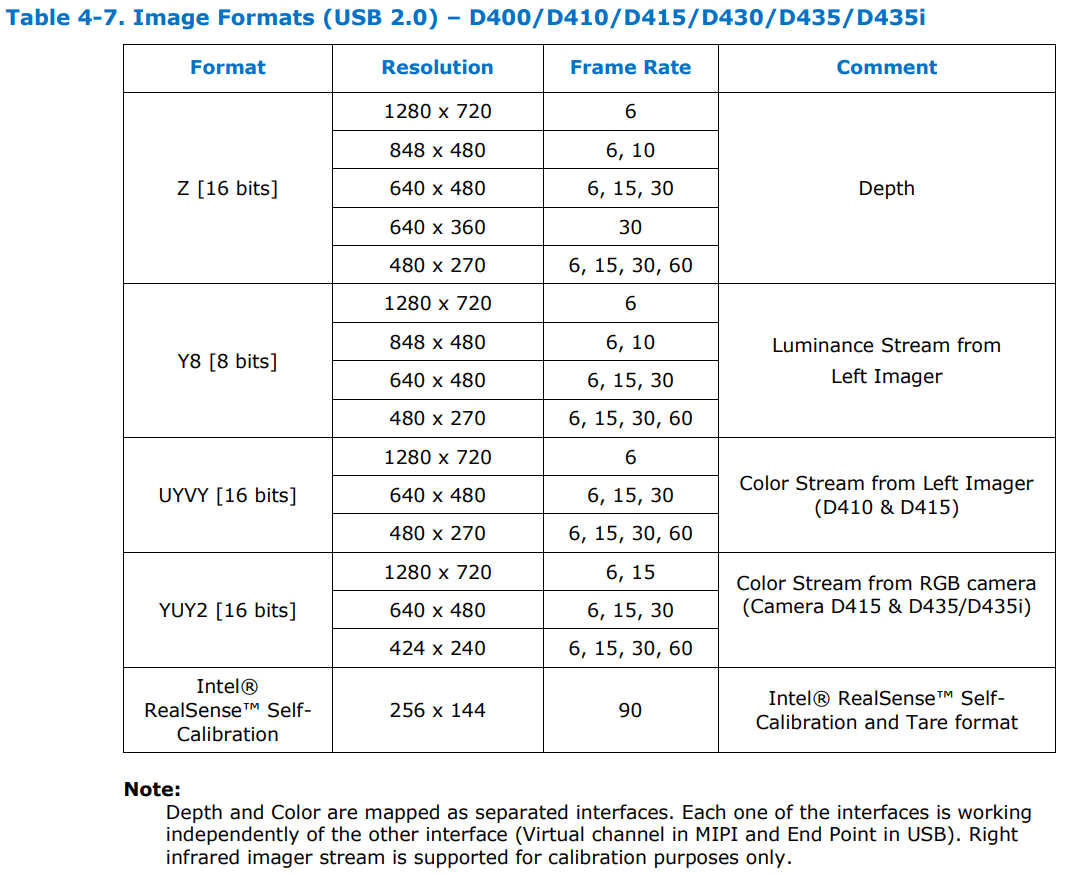
2.2.5 D405在USB2模式下支持的输出格式
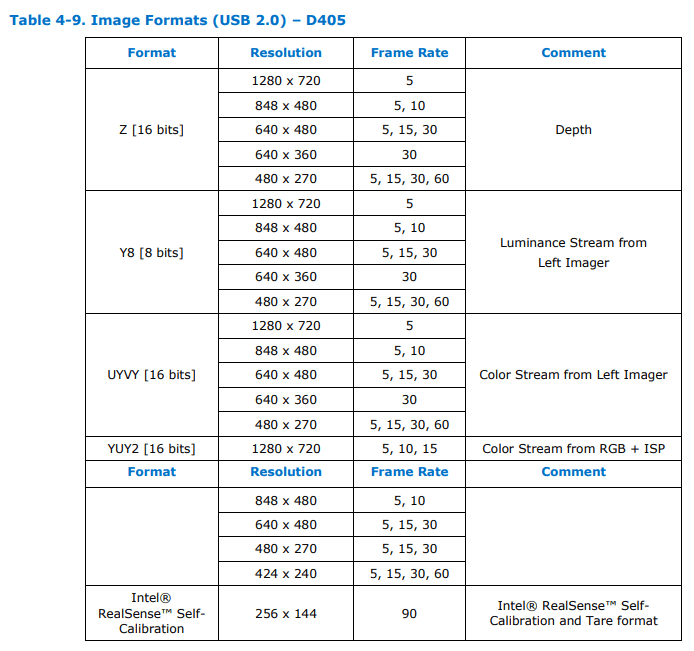 在USB2下,深度图最高支持1280×720@5fps的输出。类似的,我们也列出D435i在USB2下的输出。
在USB2下,深度图最高支持1280×720@5fps的输出。类似的,我们也列出D435i在USB2下的输出。
2.2.6 D405支持的最短观测距离
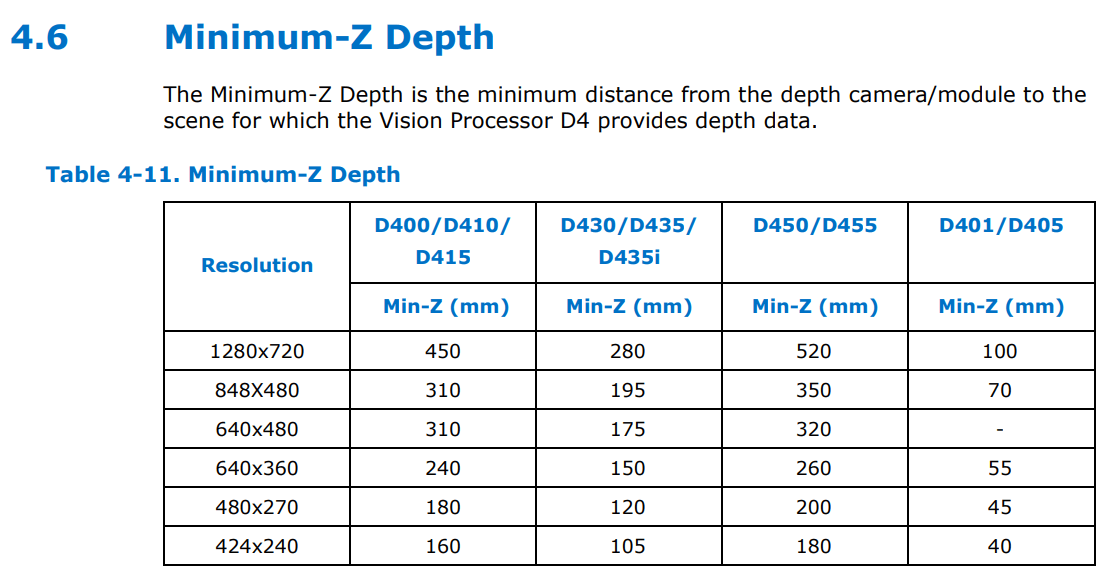 上图展示了不同分辨率下D400系列的最短观测距离。可以看到,对于D405而言,在1280×720下,最短距离为100mm,848×480下最短距离为70mm(这也就是一开始在广告中宣传的距离)。作为对比,对于D435i而言,1280×720下,最短距离为280mm,848×480下最短为195mm。可以看到,D405相比于D435i在最短距离上有较大提升。
上图展示了不同分辨率下D400系列的最短观测距离。可以看到,对于D405而言,在1280×720下,最短距离为100mm,848×480下最短距离为70mm(这也就是一开始在广告中宣传的距离)。作为对比,对于D435i而言,1280×720下,最短距离为280mm,848×480下最短为195mm。可以看到,D405相比于D435i在最短距离上有较大提升。
2.2.7 D405深度质量
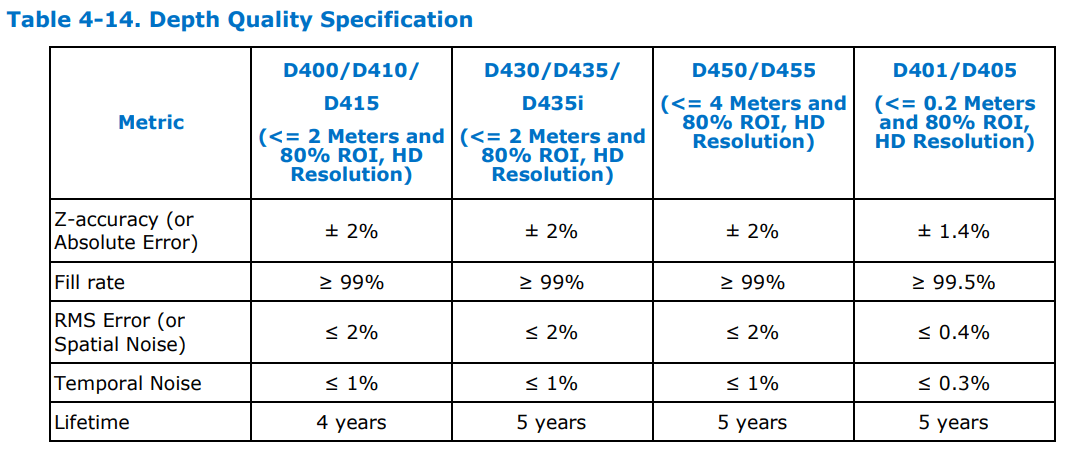 上图列出了不同传感器的深度质量。各个评价指标释义见下图。
上图列出了不同传感器的深度质量。各个评价指标释义见下图。
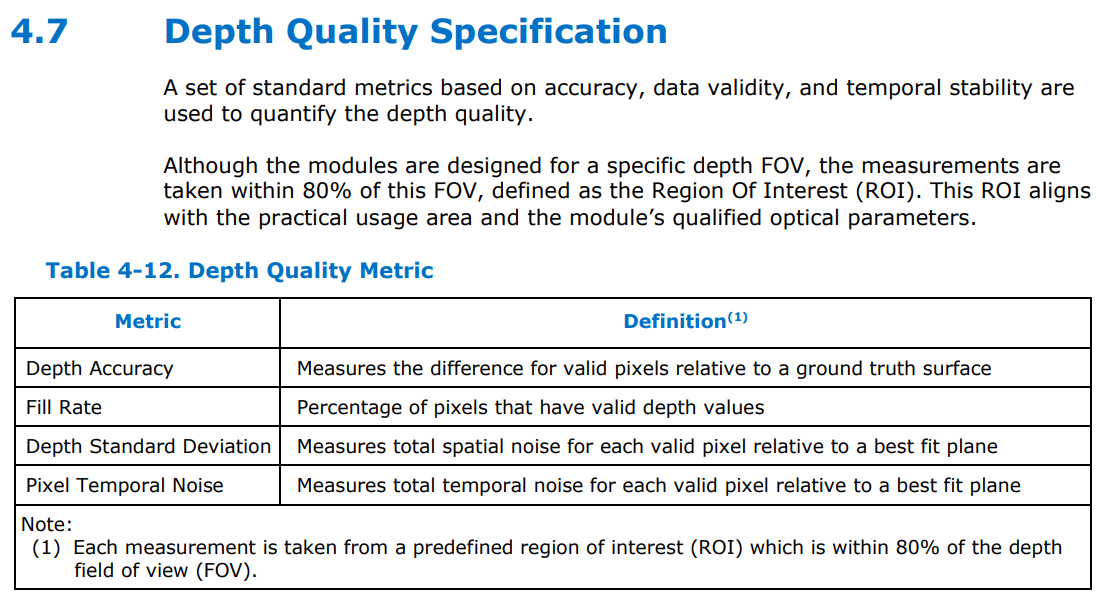
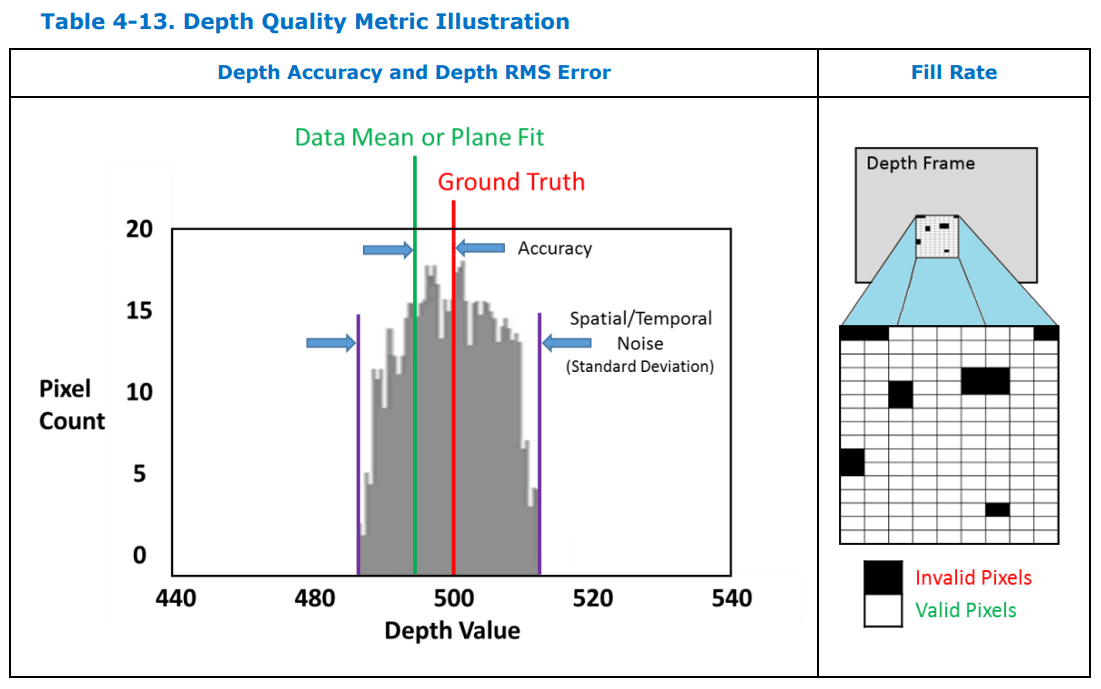 感兴趣的话可以查看源文档,了解评价指标的定义与计算方法。
感兴趣的话可以查看源文档,了解评价指标的定义与计算方法。
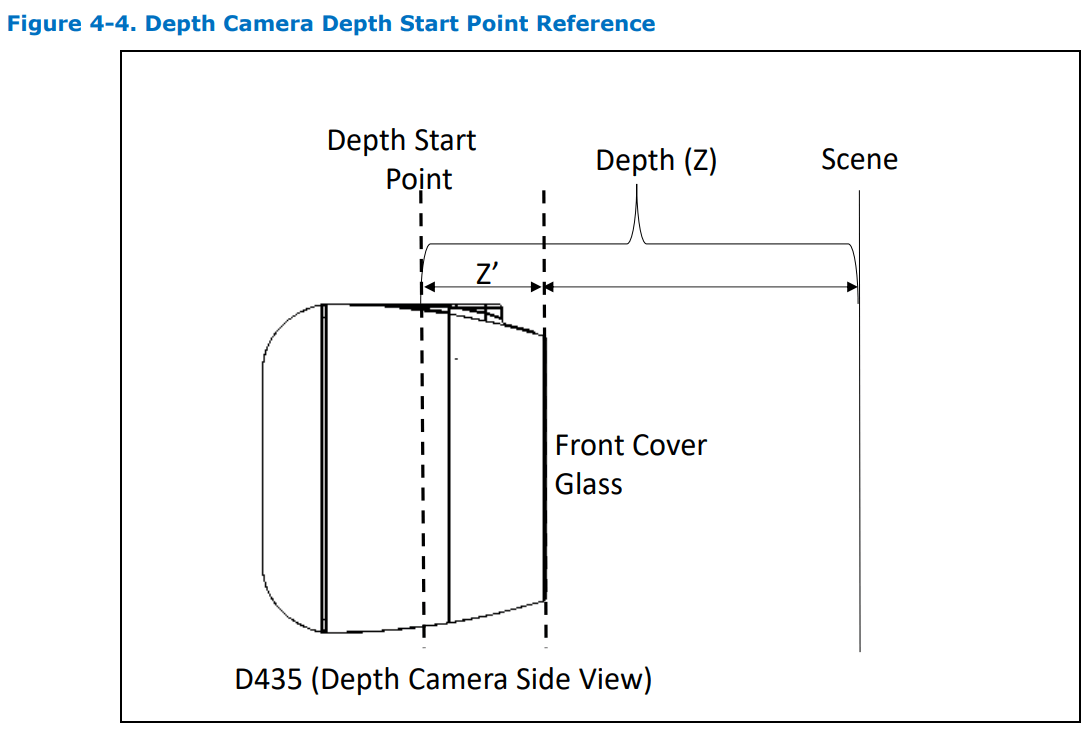
2.2.8 D405深度方向原点
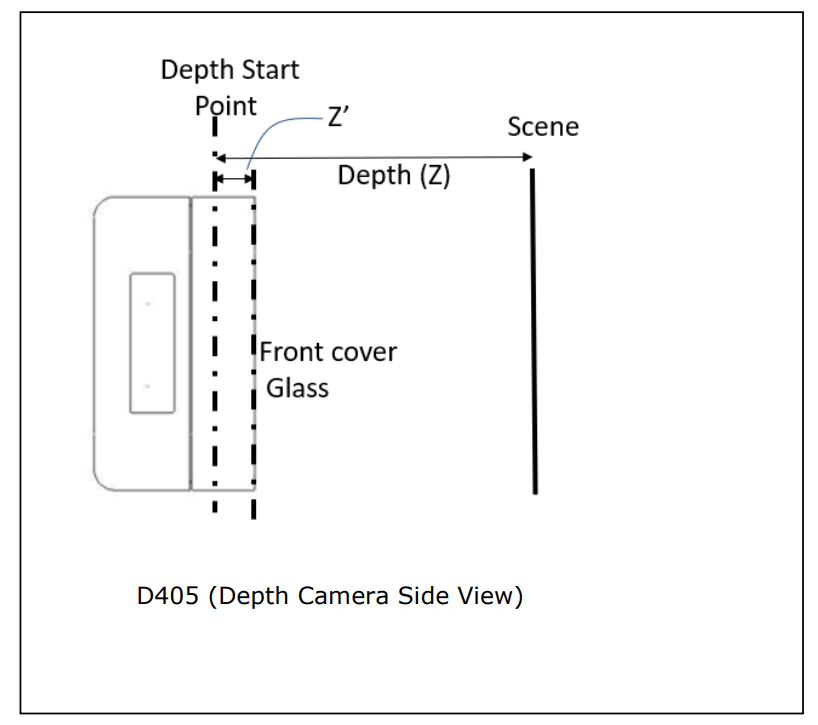 上图展示了D405深度的起始位置。可以看到,深度原点并非是从前面板开始的,而是再往后一点。进一步,作为对比,也列出D435i的深度起始位置,如下图。
上图展示了D405深度的起始位置。可以看到,深度原点并非是从前面板开始的,而是再往后一点。进一步,作为对比,也列出D435i的深度起始位置,如下图。
 具体数值见下表。
具体数值见下表。
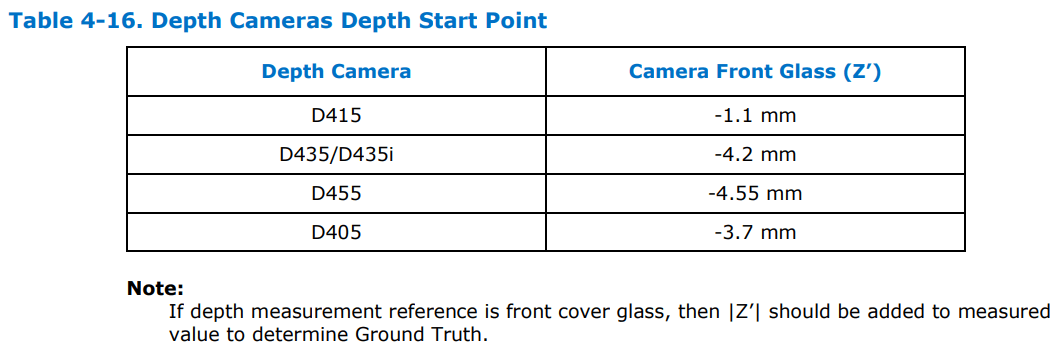 可以看到,对于D435i而言,为-4.2mm,对于D405而言,为-3.7mm。
可以看到,对于D435i而言,为-4.2mm,对于D405而言,为-3.7mm。
2.2.9 D405平面方向原点
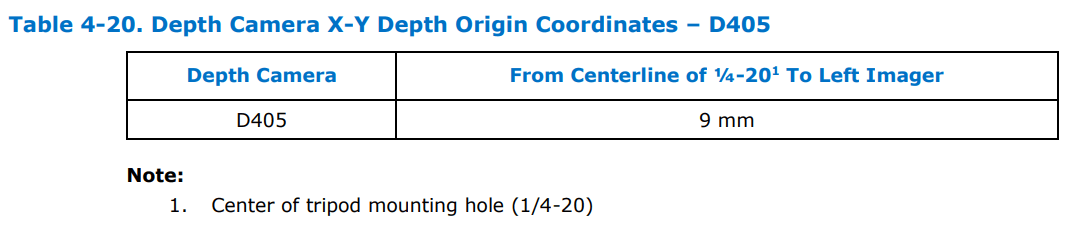 上表展示了D405从三脚架安装孔中心到左摄像头之间的距离,为9mm。类似的,我们也列出D435i的对应参数,如下。
上表展示了D405从三脚架安装孔中心到左摄像头之间的距离,为9mm。类似的,我们也列出D435i的对应参数,如下。
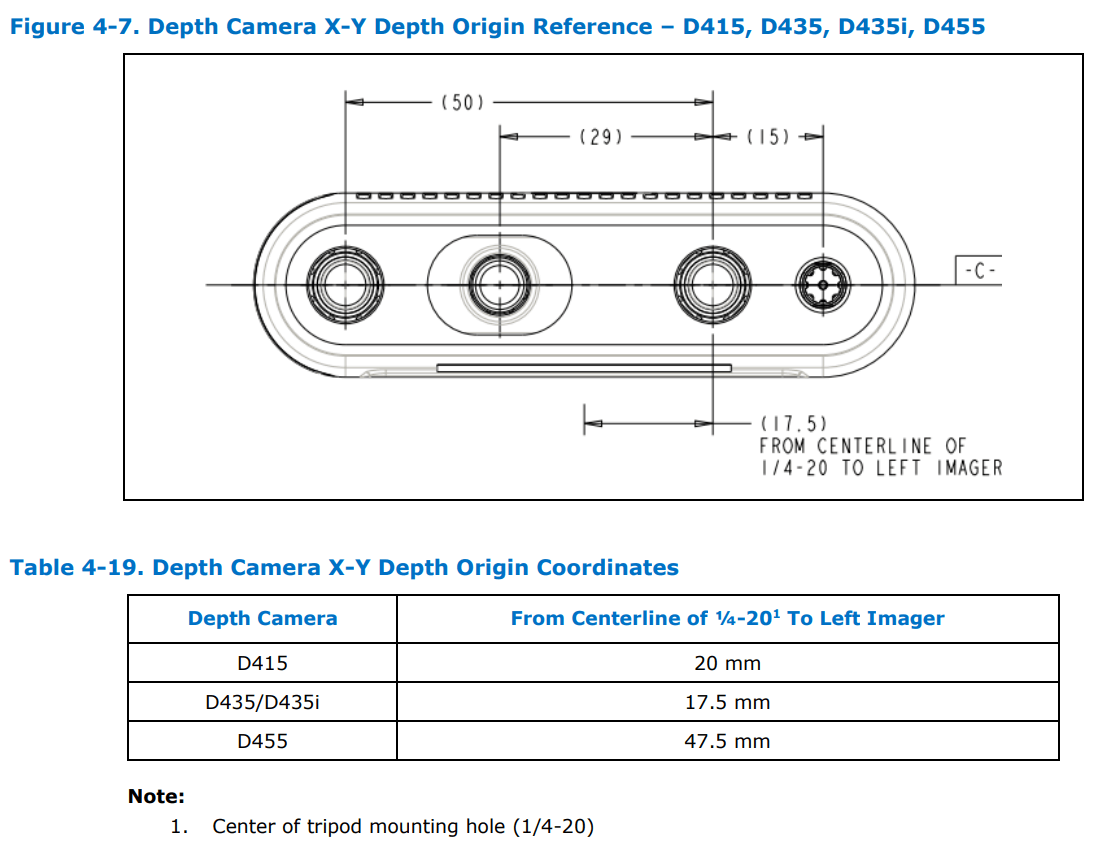 对于D435i而言,从三角架安装孔到左相机中心的距离为17.5mm。
对于D435i而言,从三角架安装孔到左相机中心的距离为17.5mm。
2.2.10 D405的硬件模块
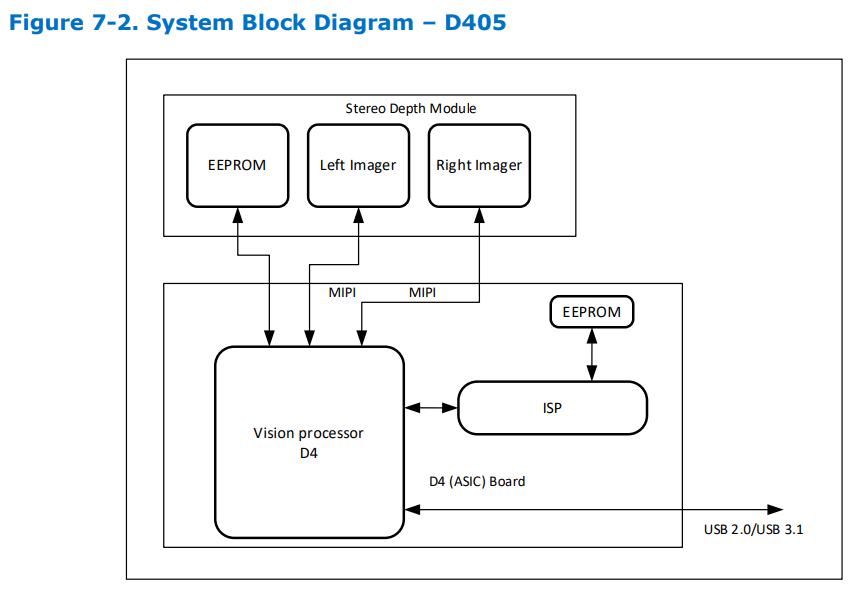 上图展示了D405硬件模块之间的关系。可以看到,主要就是左右两个相机。EEPROM是用于存储校正数据的闪存。下图则是D435i的硬件架构。
上图展示了D405硬件模块之间的关系。可以看到,主要就是左右两个相机。EEPROM是用于存储校正数据的闪存。下图则是D435i的硬件架构。
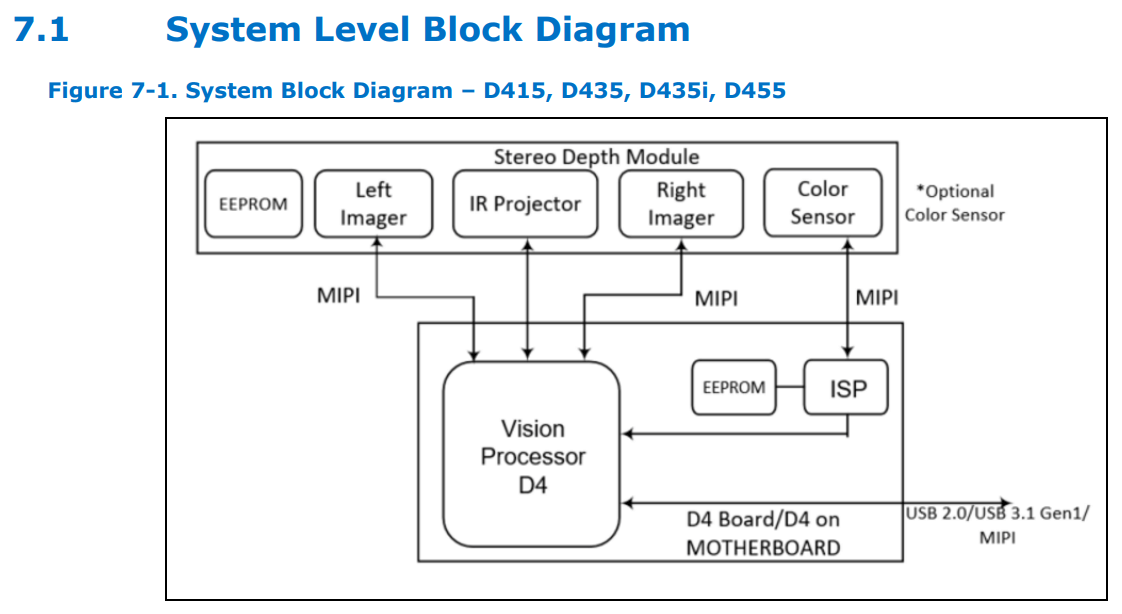 可以看到,相比于D405,多了红外发射器、RGB相机。
可以看到,相比于D405,多了红外发射器、RGB相机。
2.2.11 D405的功耗
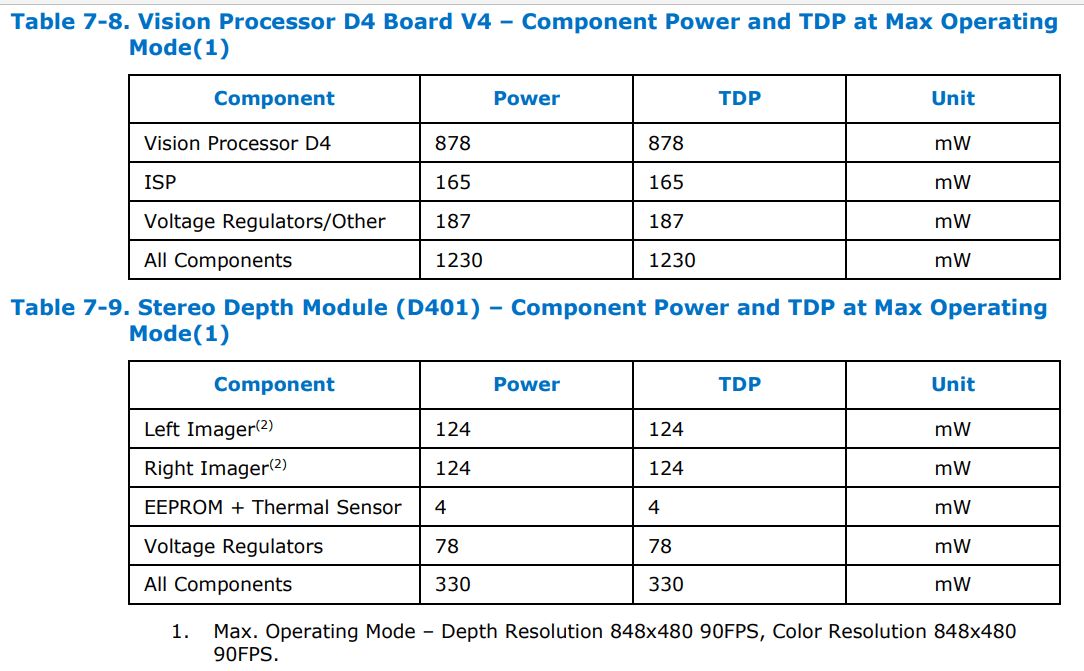 上图展示了Vision Processor D4 Board V4和D401的功耗。前面说了,D405的核心就是这两个模块,所以它们相加可以估算出D405的功耗,约为1560mW。作为对比,给出D435i的功耗,如下。
上图展示了Vision Processor D4 Board V4和D401的功耗。前面说了,D405的核心就是这两个模块,所以它们相加可以估算出D405的功耗,约为1560mW。作为对比,给出D435i的功耗,如下。
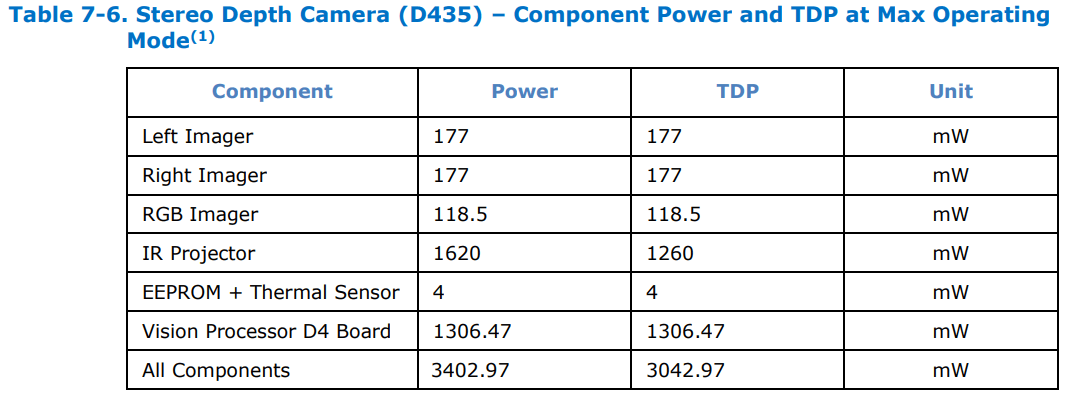 D405的功耗。总功耗大约为3402.97mW。
D405的功耗。总功耗大约为3402.97mW。
2.2.12 D405相机光谱信息
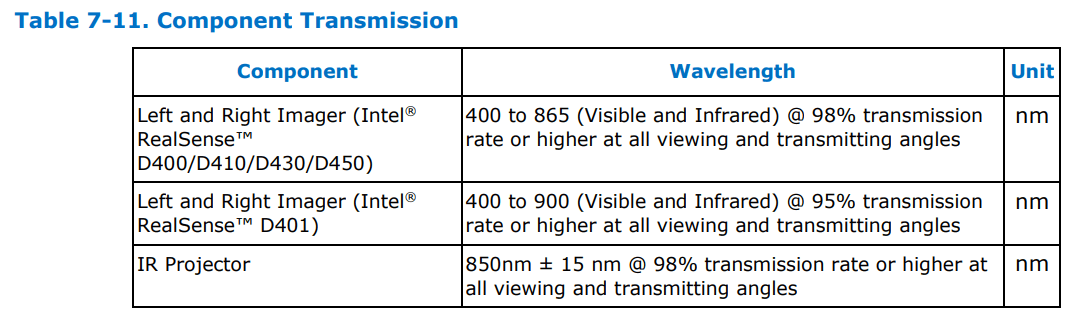 上图列出了不同深度模块的光谱信息。D405采用D401深度模块,所以对应表中的第二行,可接收400-900nm的光谱,覆盖可见光到红外波段。D435i采用D430深度模块,对应表中第一行,可接收400-865nm光谱,覆盖可见光到红外波段。而D435i带有的红外发射器可以发射850±15nm的红外光。通常可见光波长范围为390-760nm。
上图列出了不同深度模块的光谱信息。D405采用D401深度模块,所以对应表中的第二行,可接收400-900nm的光谱,覆盖可见光到红外波段。D435i采用D430深度模块,对应表中第一行,可接收400-865nm光谱,覆盖可见光到红外波段。而D435i带有的红外发射器可以发射850±15nm的红外光。通常可见光波长范围为390-760nm。
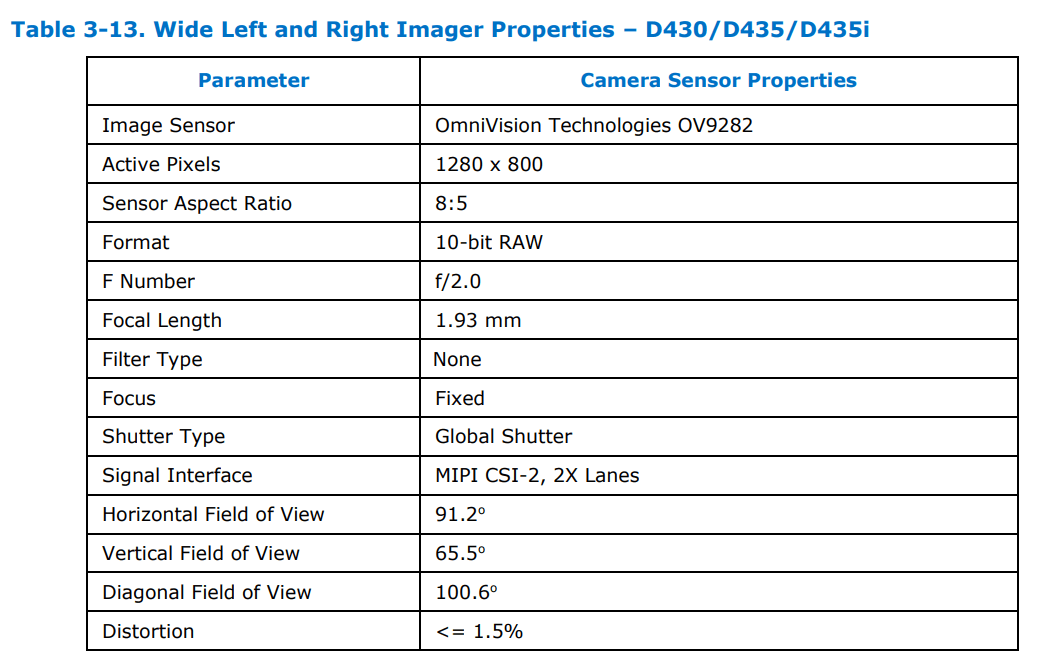
2.2.13 D405彩色相机详细参数
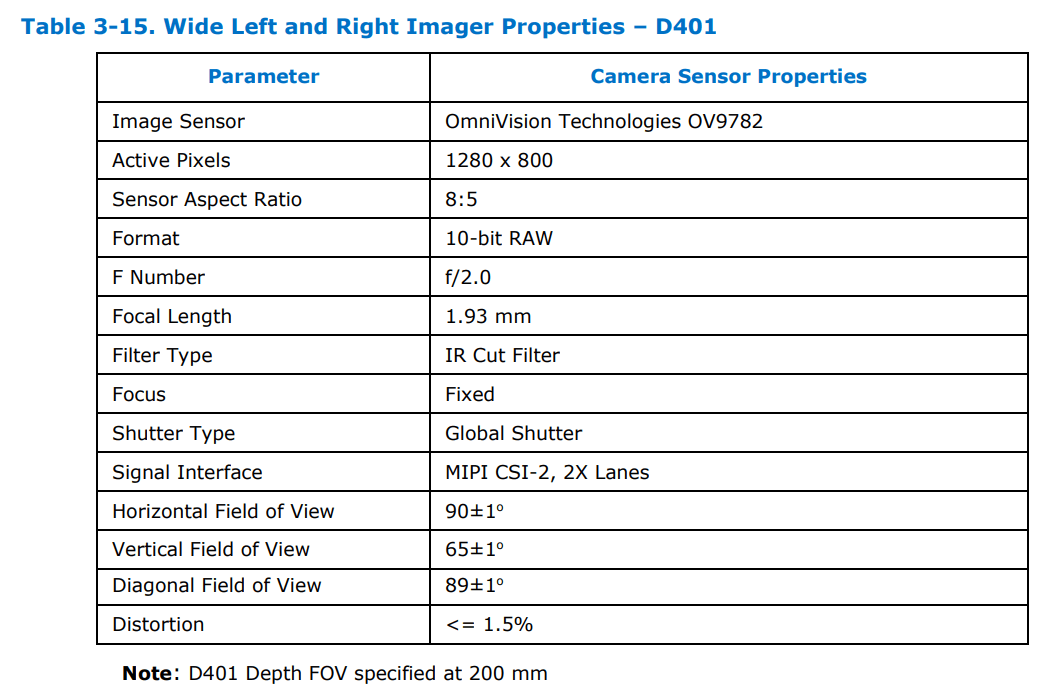 上面说了,D405采用的是OV9782相机(内置在D401深度模块中),D435i采用的是OV2740相机。它们均来自豪威公司(Omnivision)。下图则展示了OV9282的相关参数。
上面说了,D405采用的是OV9782相机(内置在D401深度模块中),D435i采用的是OV2740相机。它们均来自豪威公司(Omnivision)。下图则展示了OV9282的相关参数。
2.2.14 D435i红外发射器详细参数
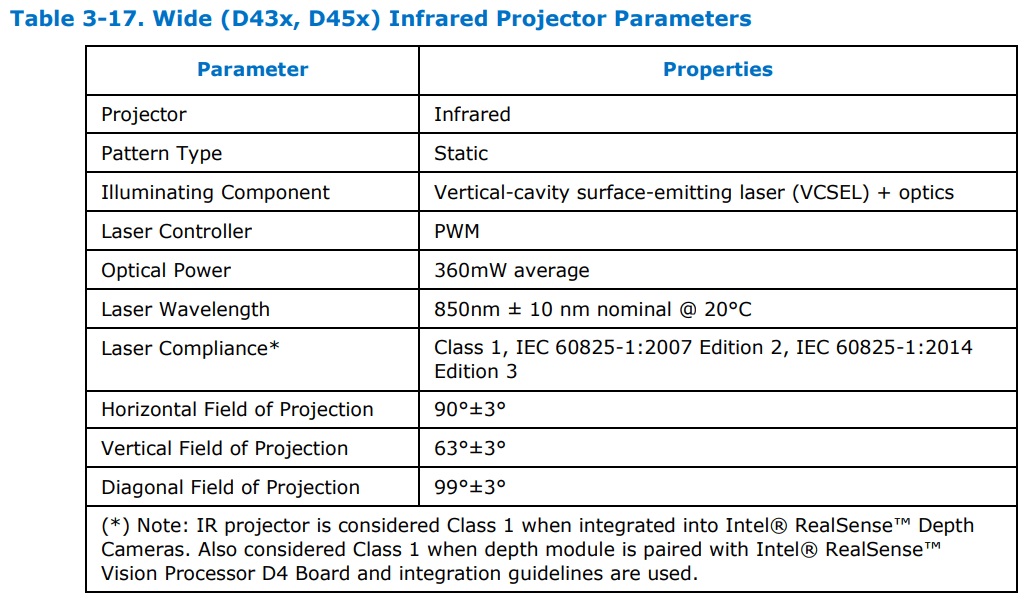 上图列举了D435i中红外发射器的详细参数。
上图列举了D435i中红外发射器的详细参数。
3.数据可视化与基本使用
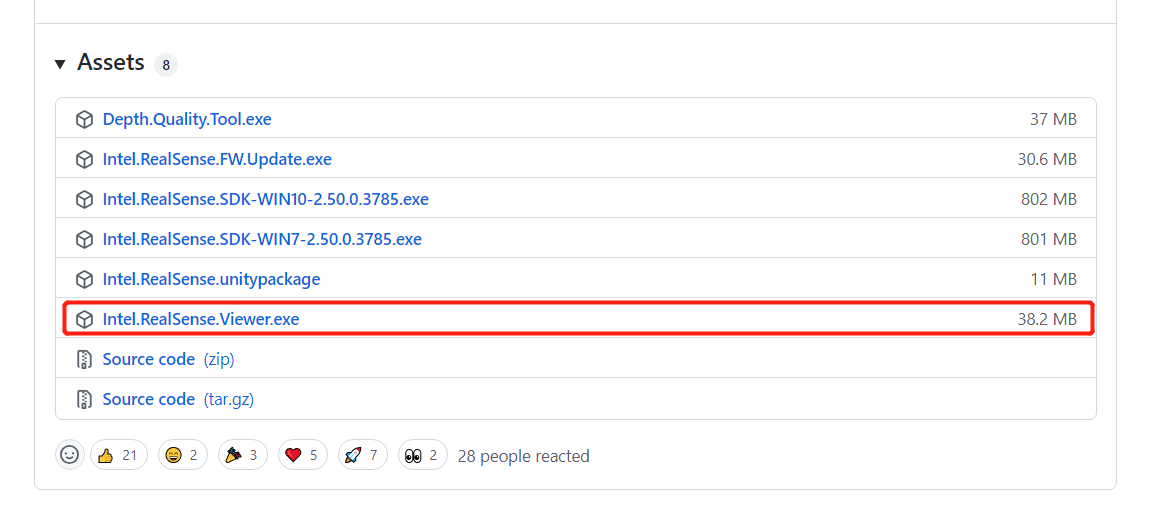
首先从官网下载最新的Viewer,如下图所示。
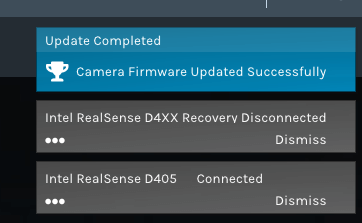
 然后连接D405,打开Viewer,第一次连接可能会提示更新固件,可以更新一下,如下图所示。
然后连接D405,打开Viewer,第一次连接可能会提示更新固件,可以更新一下,如下图所示。
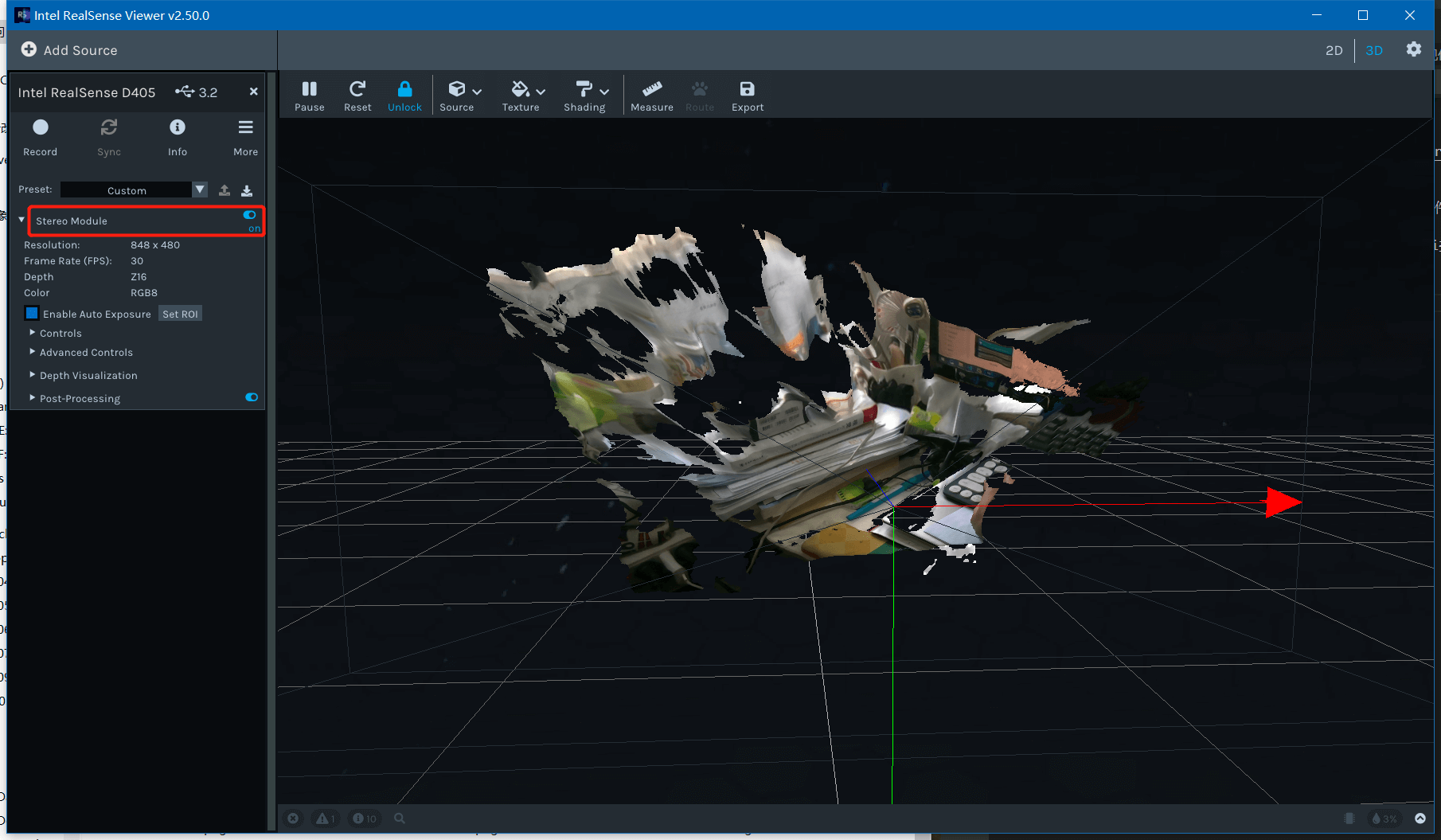
 更新完成以后,就可以正常使用了。使用方式和之前的D435i类似。打开左侧的”Stereo Module”即可看到彩色RGB点云。
更新完成以后,就可以正常使用了。使用方式和之前的D435i类似。打开左侧的”Stereo Module”即可看到彩色RGB点云。
至此,我们就可以正常使用D405了,而关于如何通过Realsense的API接口获取D405的数据,在之后的博客再进行介绍。
本文作者原创,未经许可不得转载,谢谢配合
