因为项目原因,实验室又新弄了一个Velodyne VLP-16型号的16线激光雷达,需要简单做个测试。这篇博客就简单记录一下测试流程。
1.硬件组成与接口
Velodyne硬件应该都不陌生了,官方给的配件包含一个LiDAR本体还有一个数据转接盒,如下图所示。
 这个数据转接盒有两个作用,一个是给LiDAR供电,另一个是将LiDAR数据输出出来。LiDAR端的接口如下:
这个数据转接盒有两个作用,一个是给LiDAR供电,另一个是将LiDAR数据输出出来。LiDAR端的接口如下:
 一般情况下插好以后就不用再管了。它的另一端直接连接到转接盒里面。转接盒的端口如下。
一般情况下插好以后就不用再管了。它的另一端直接连接到转接盒里面。转接盒的端口如下。
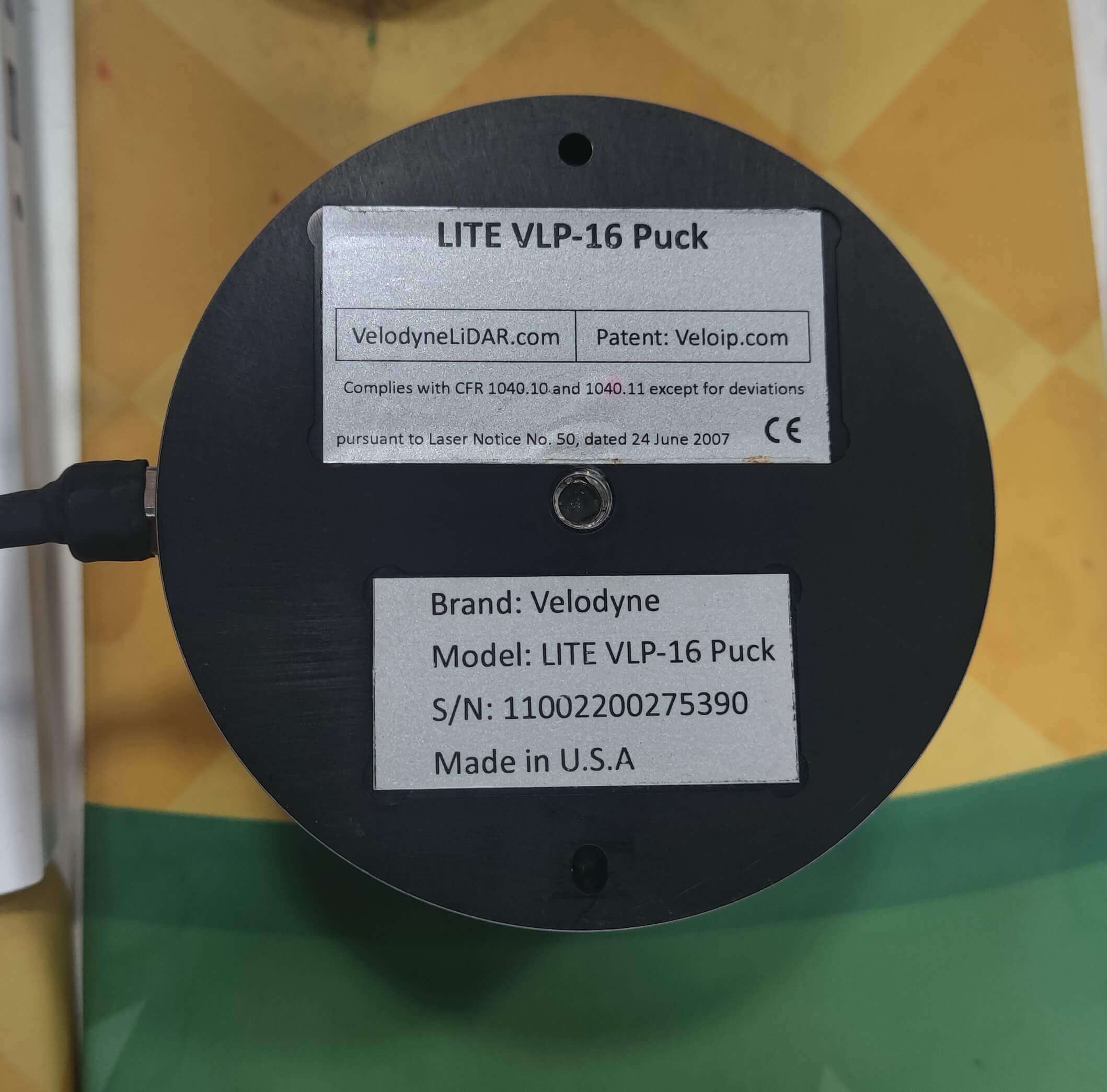
 包含一个输出网口、一个输入的电源口,一个输入的GPS口。输入电源口需要10.5V-18V的电源(一般12V电源即可)。而LiDAR本体下面有一个标准的螺口,可以方便和三角架等设备相固连,如下所示。
包含一个输出网口、一个输入的电源口,一个输入的GPS口。输入电源口需要10.5V-18V的电源(一般12V电源即可)。而LiDAR本体下面有一个标准的螺口,可以方便和三角架等设备相固连,如下所示。
2.硬件连接
首先,将一个12V的电源准备好,然后插到转接盒的POWER口。然后再利用网线将转接盒的网口和电脑的网口连接起来,如下图所示。
 正常情况下,接好之后,转接盒绿色的指示灯就会亮,LiDAR也会开始转动。这时候就说明传感器准备好采集数据了。
正常情况下,接好之后,转接盒绿色的指示灯就会亮,LiDAR也会开始转动。这时候就说明传感器准备好采集数据了。
3.系统IP配置
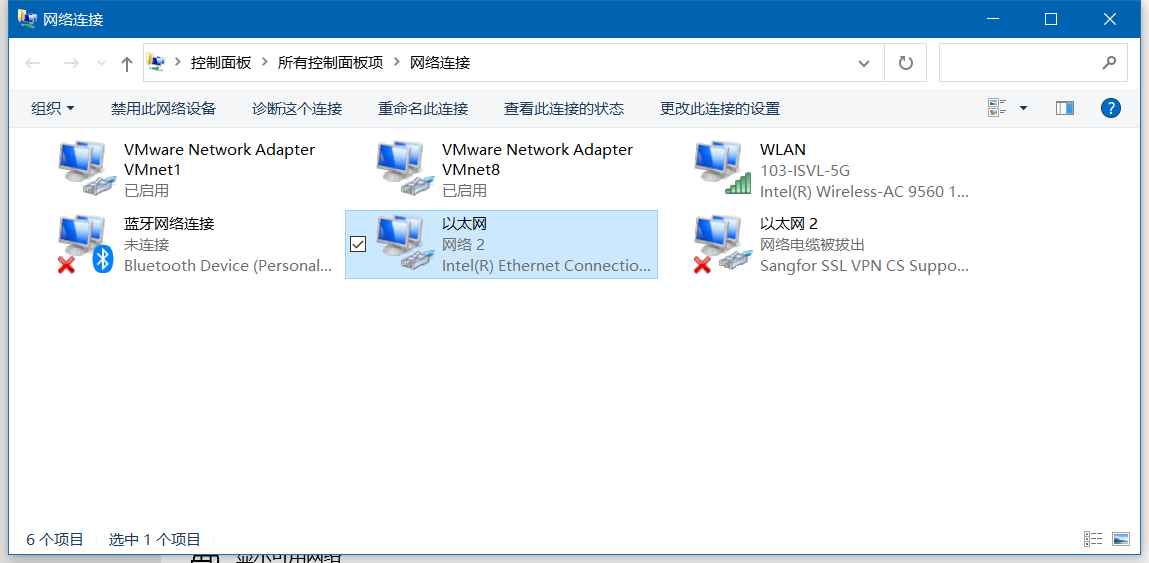
在将LiDAR通过网口连接到电脑以后,我们需要打开电脑的网络连接选项,如下图所示。
 手动修改连接IP,如下。
手动修改连接IP,如下。
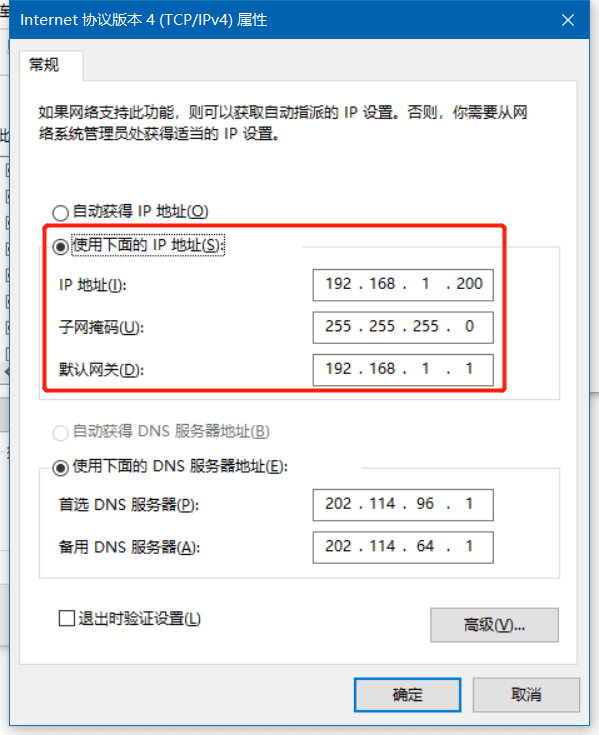 我们重点需要修改的就是IP地址、子网掩码、默认网关。后面的DNS地址不用管。对于Velodyne LiDAR,它自己的IP地址是192.168.1.201,我们可以设置192.168.1.x为本机地址。x的取值范围为除了201之外的1到254之间的所有数,比如200。子网掩码为255.255.255.0,默认网关为192.168.1.1。最后保存即可。
我们重点需要修改的就是IP地址、子网掩码、默认网关。后面的DNS地址不用管。对于Velodyne LiDAR,它自己的IP地址是192.168.1.201,我们可以设置192.168.1.x为本机地址。x的取值范围为除了201之外的1到254之间的所有数,比如200。子网掩码为255.255.255.0,默认网关为192.168.1.1。最后保存即可。
4.可视化点云数据
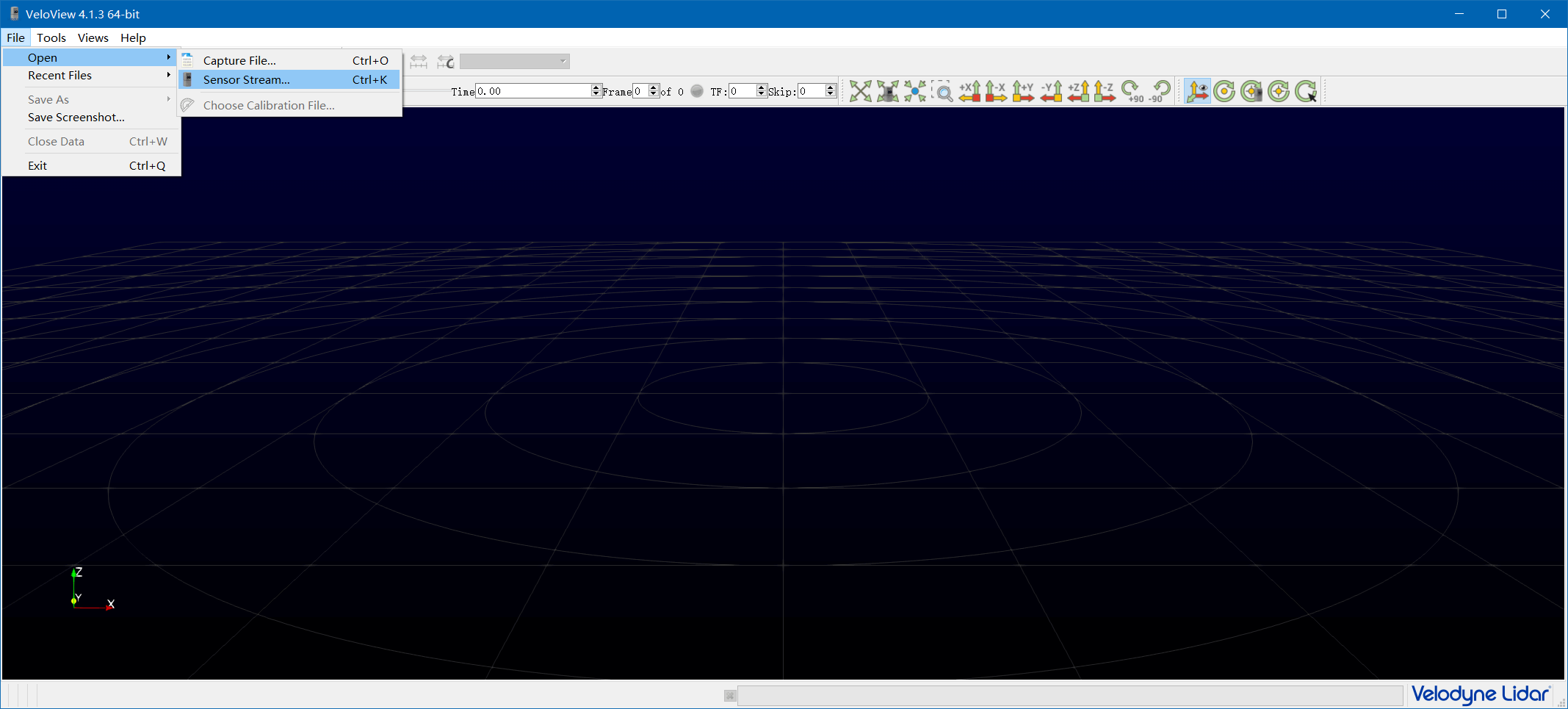
和之前博客说的一样,我们可以用VeloView可视化点云数据。只不过之前是打开文件,现在是直接读取数据流。我们依次点击File-Open-Sensor Stream,如下。
 然后会弹出传感器配置对话框,我们选择VLP-16,如下。
然后会弹出传感器配置对话框,我们选择VLP-16,如下。
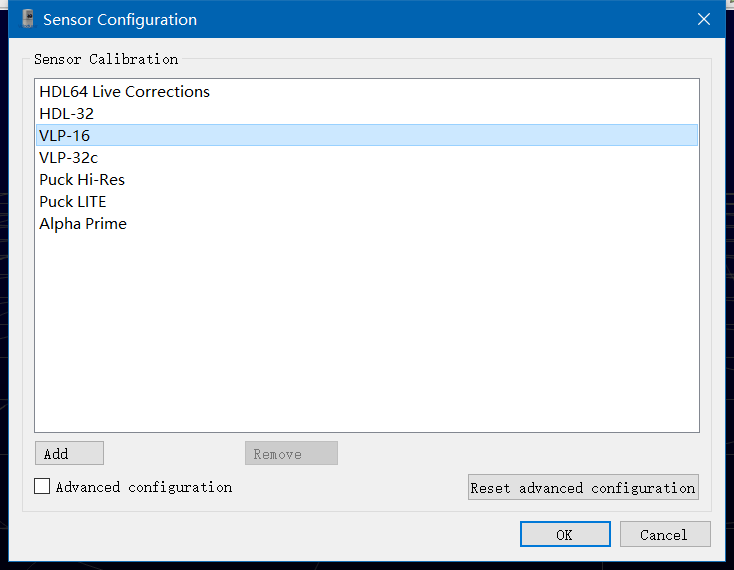 点击“OK”以后,正常情况就应该可以看到可视化的点云了,如下。
点击“OK”以后,正常情况就应该可以看到可视化的点云了,如下。
 至此便完成了LiDAR点云数据最基本的可视化。事实上,经过测试发现,如果只是用VeloView可视化数据,并不需要手动修改IP地址,连接好传感器之后,直接打开VeloView同样可以显示数据。
至此便完成了LiDAR点云数据最基本的可视化。事实上,经过测试发现,如果只是用VeloView可视化数据,并不需要手动修改IP地址,连接好传感器之后,直接打开VeloView同样可以显示数据。
5.LiDAR参数配置
Velodyne LiDAR提供了一个基本的参数配置网页。连接好LiDAR以后,打开浏览器,输入192.168.1.201(即Velodyne LiDAR的本机地址)即可打开配置界面,如下所示。
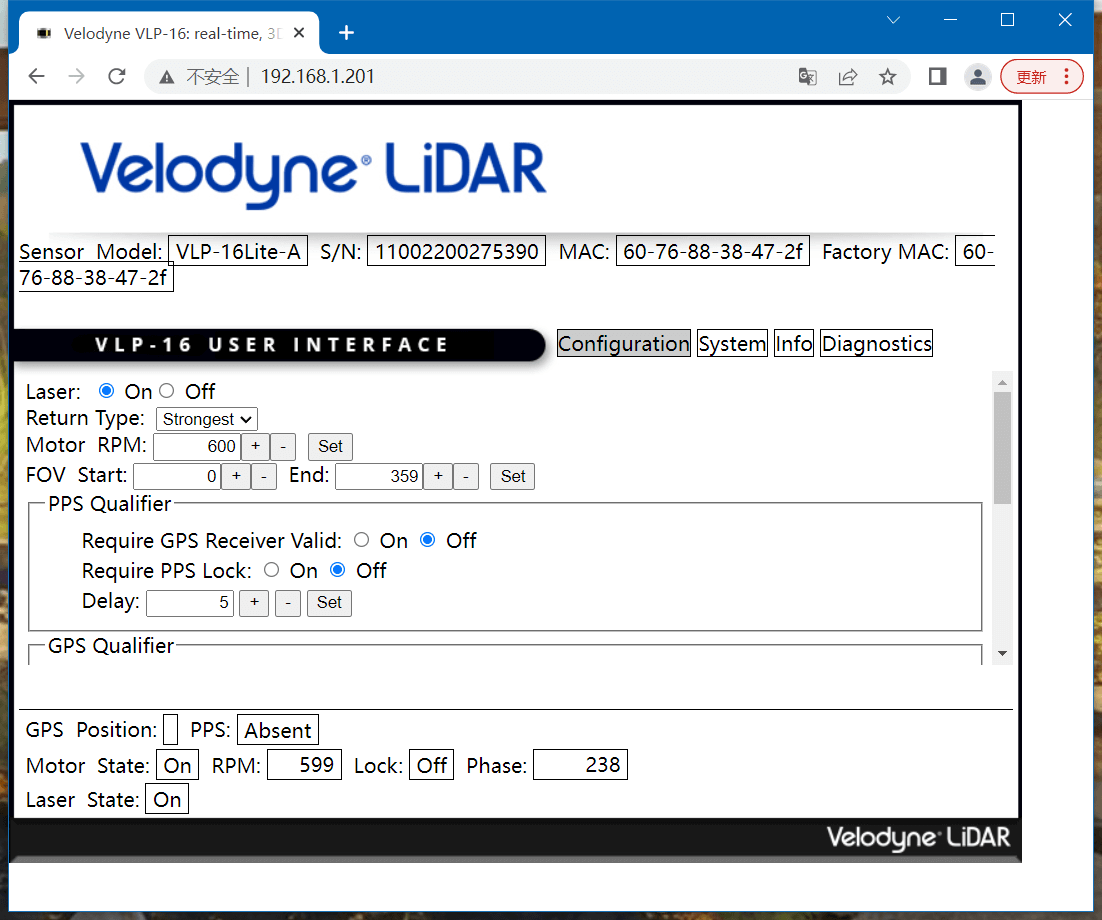 在这个界面中,我们可以调整LiDAR的转速等各项参数。并且当前LiDAR的状态也会实时显示出来。需要注意的是,如果输入上面的地址没有反应,那么十有八九是电脑本机的IP没设置对,请按照第三步流程重新设置IP,保证和LiDAR在同一网段(局域网)下。
在这个界面中,我们可以调整LiDAR的转速等各项参数。并且当前LiDAR的状态也会实时显示出来。需要注意的是,如果输入上面的地址没有反应,那么十有八九是电脑本机的IP没设置对,请按照第三步流程重新设置IP,保证和LiDAR在同一网段(局域网)下。
6.LiDAR之间干扰实验
拿到这个新的LiDAR以后,正巧手边还有另一台16线雷达,如下图所示。

 可以看到,红色的光斑就是机械雷达扫描的激光。这个激光用肉眼是看不见的,但是用相机就可以拍到。这是因为相机的感受光谱范围比我们人眼要多一些,所以可以看到这些激光。
两个LiDAR在一起以后,自然地想简单做个实验,测试一下如果两个LiDAR放一起,会不会对彼此造成影响。如下图所示,将两个LiDAR相对静止放置。
可以看到,红色的光斑就是机械雷达扫描的激光。这个激光用肉眼是看不见的,但是用相机就可以拍到。这是因为相机的感受光谱范围比我们人眼要多一些,所以可以看到这些激光。
两个LiDAR在一起以后,自然地想简单做个实验,测试一下如果两个LiDAR放一起,会不会对彼此造成影响。如下图所示,将两个LiDAR相对静止放置。
 测试的效果如下图所示。
测试的效果如下图所示。
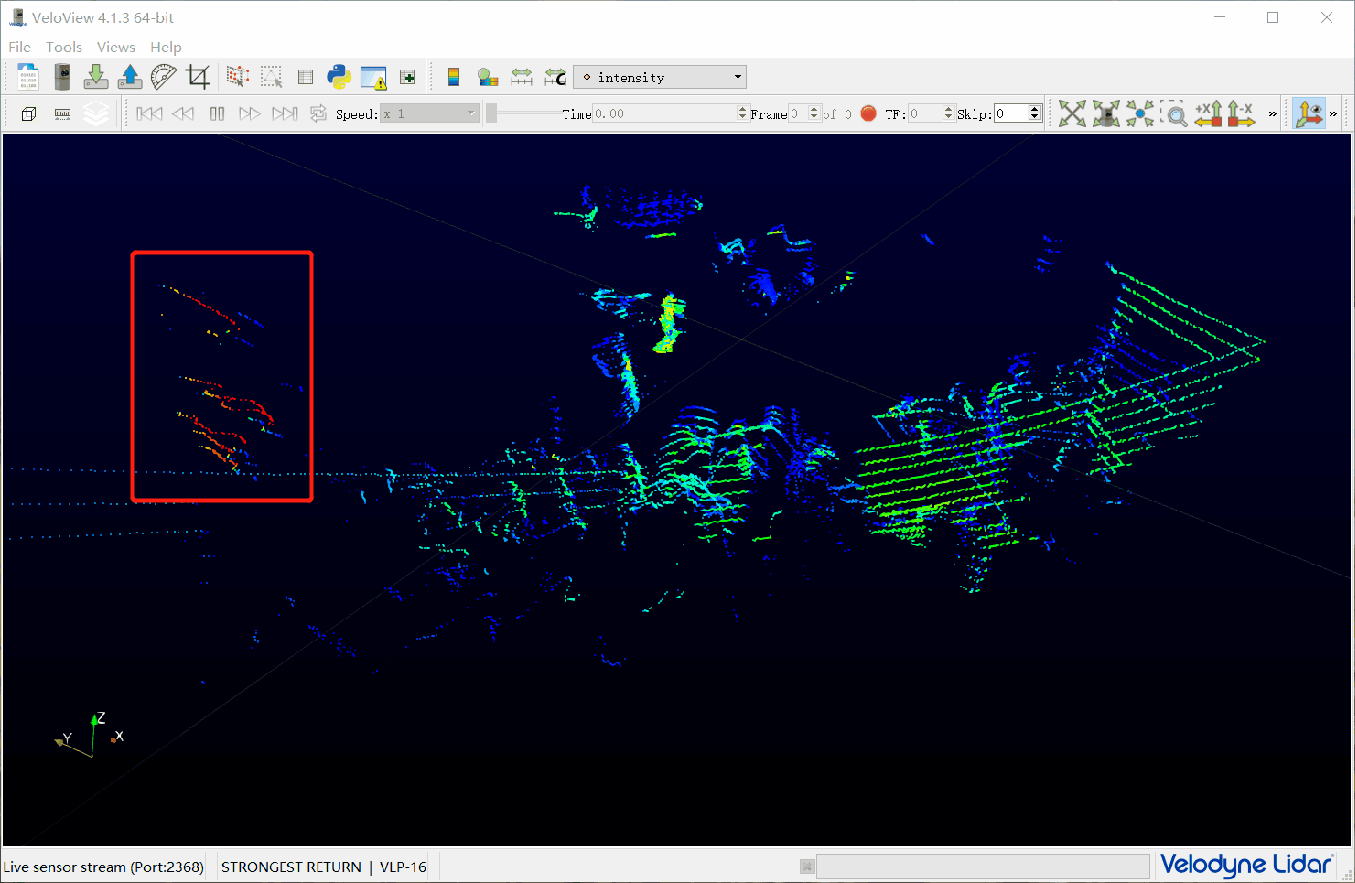
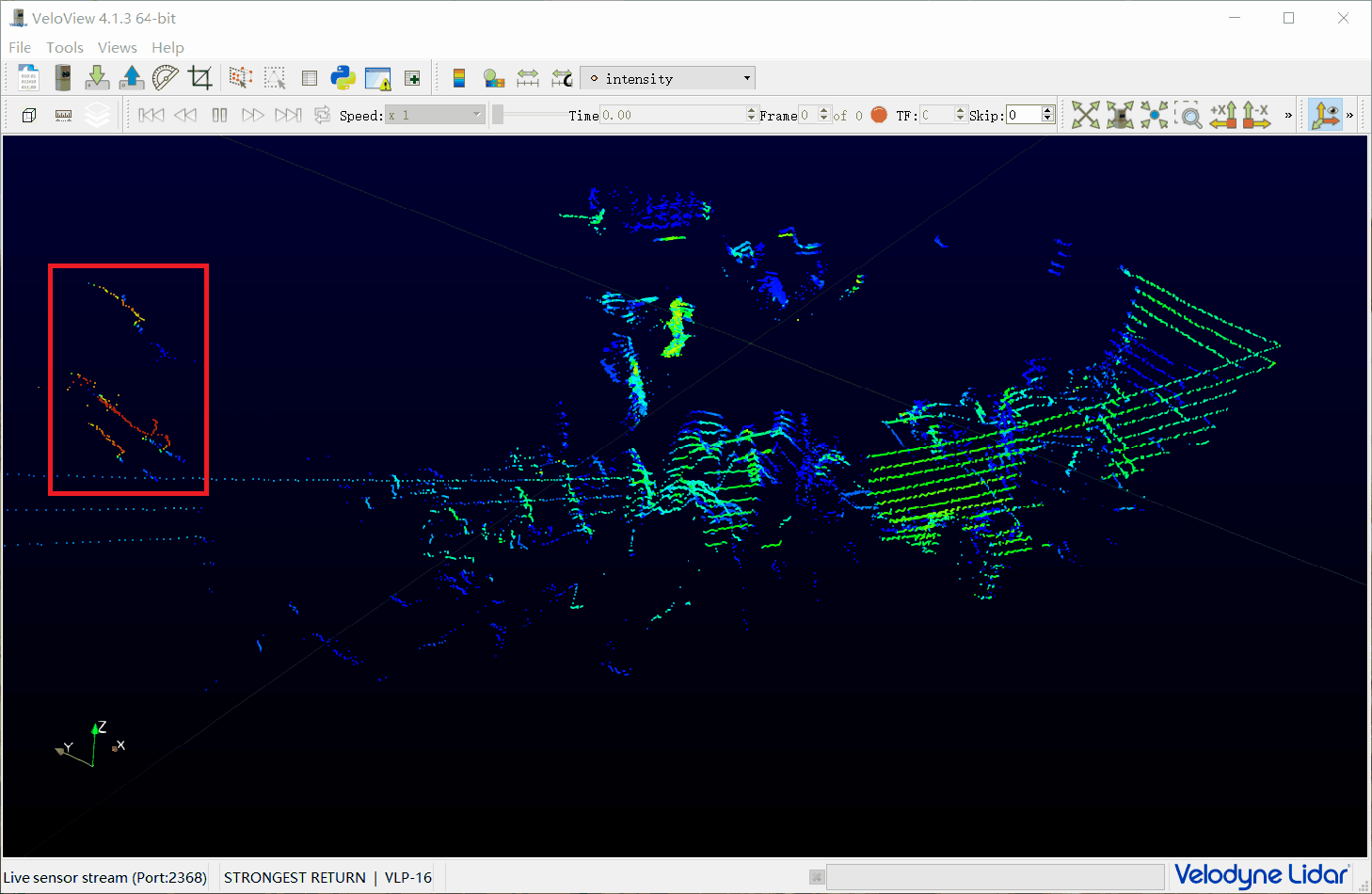
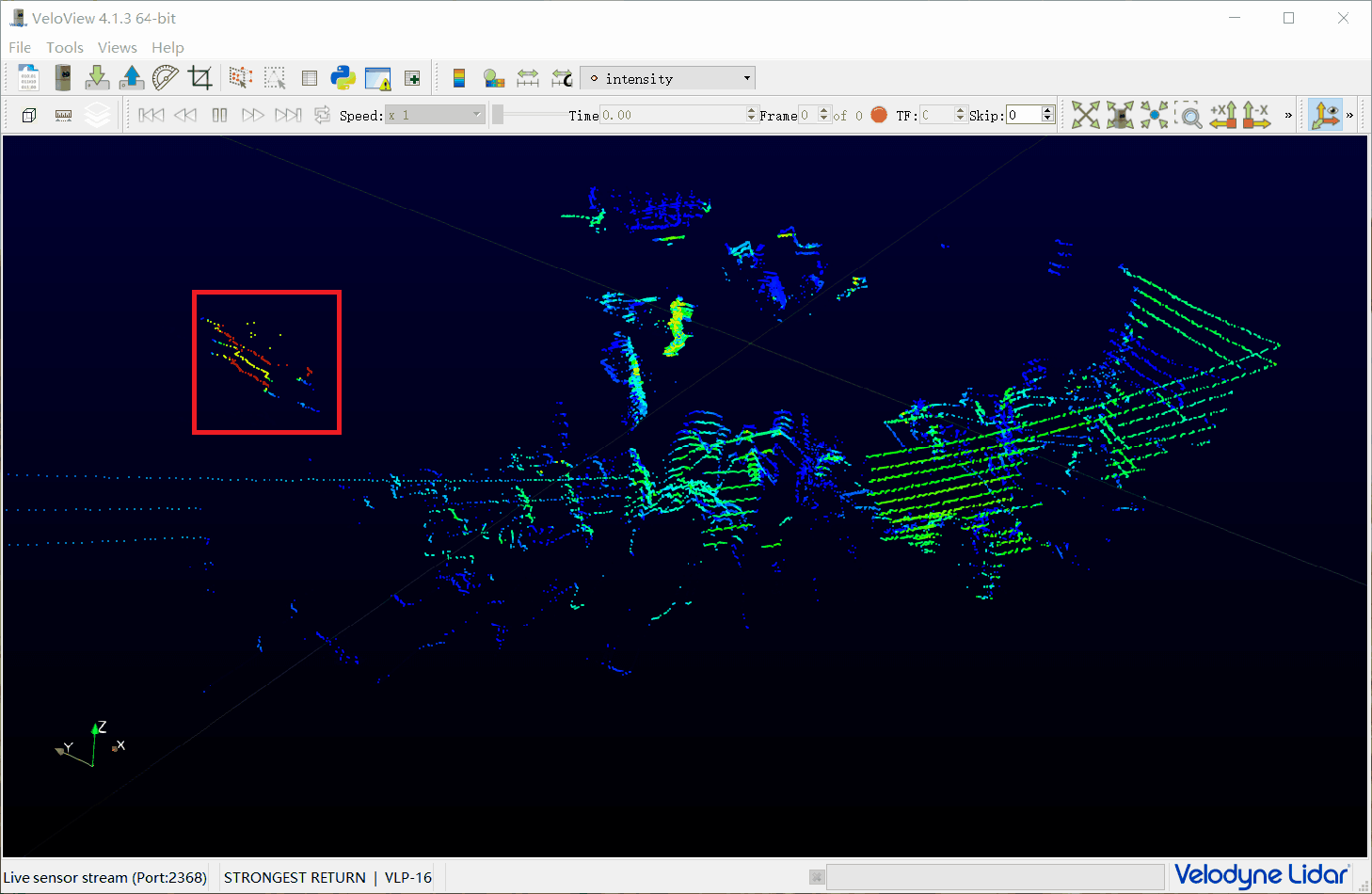 可以看到,当两个LiDAR在一起的时候,有一定几率以一定的周期出现异常噪声。这种情况也很容易理解,一个LiDAR接收到了另一个LiDAR的数据,进而导致了这种异常的、周期的噪声的出现。注意,这种噪声并非是由于另一个LiDAR的镜面反射导致的,因为如果是反射的异常噪声的话应该一直都有,而不是以一种特殊的周期出现。所以结论就是:当两个或多个LiDAR在一起的时候,有可能会相互干扰,导致一些异常噪声的出现。但这种噪声对于后续应用有多大的影响,还需要具体问题具体分析。
可以看到,当两个LiDAR在一起的时候,有一定几率以一定的周期出现异常噪声。这种情况也很容易理解,一个LiDAR接收到了另一个LiDAR的数据,进而导致了这种异常的、周期的噪声的出现。注意,这种噪声并非是由于另一个LiDAR的镜面反射导致的,因为如果是反射的异常噪声的话应该一直都有,而不是以一种特殊的周期出现。所以结论就是:当两个或多个LiDAR在一起的时候,有可能会相互干扰,导致一些异常噪声的出现。但这种噪声对于后续应用有多大的影响,还需要具体问题具体分析。
7.参考资料
- [1] https://www.freesion.com/article/56121490348/
- [2] https://blog.csdn.net/weixin_42301918/article/details/123612355
- [3] https://baijiahao.baidu.com/s?id=1718554061987899929
- [4] https://blog.csdn.net/weixin_46947900/article/details/124248396
本文作者原创,未经许可不得转载,谢谢配合
