手上有一轨视频卫星的姿态数据(xml格式),需要获得每一帧拍摄时的卫星姿态,因此需要对卫星下传的姿态数据进行内插。 在很久以前写过一个脚本用于解决这个问题的,但不知道为什么就是找不到了。 所以这里重新写一下,并以博客的形式记下来,这样以后就不会再找不到了。 下面直接上代码。
1.代码
对于内插代码,主要分为两部分,一部分是xml的解析,另一部分是解析后的数据的内插。
对于xml的解析,Python有很多包可以使用,这里使用了xml.dom.minidom包,而内插则使用了Scipy的interpolate包。
# coding=utf-8
import xml.dom.minidom as xmldom
from matplotlib import pyplot as plt
from scipy.interpolate import interp1d
def readTimeFile(file_path):
"""
自定义函数,用于读取行时文件
:param file_path: 行时文件的文件路径
:return: 以list方式返回行时文件中的FrameNum和UTC属性值
"""
FrameNums = []
UTCs = []
# 新建xml解析对象
domobj = xmldom.parse(file_path)
# 获取根节点ClockInfo
ClockInfo = domobj.documentElement
# 找到根节点下的叫做TimeParams的子节点
TimeParams = ClockInfo.getElementsByTagName("TimeParams")[0]
# 找到TimeParams节点下的所有LineParam节点
LineParam = TimeParams.getElementsByTagName("LineParam")
# 对每一个LineParam获取相关属性信息
for item in LineParam:
# 获取FrameNum、UTC节点并且返回它们的属性值
FrameNum = item.getElementsByTagName("FrameNum")[0].firstChild.data
UTC = item.getElementsByTagName("UTC")[0].firstChild.data
# 将获取到的一帧的属性值添加到list中
FrameNums.append(int(FrameNum))
UTCs.append(float(UTC))
return FrameNums, UTCs
def readAttFile(file_path):
"""
自定义函数用于读取姿态文件
:param file_path: 姿态文件的文件路径
:return: 以list方式返回UTC、Roll、Pitch、Yaw属性值
"""
UTCs = []
Rolls = []
Pitchs = []
Yaws = []
domobj = xmldom.parse(file_path)
AttMeasurement = domobj.documentElement
AttitudeParameter = AttMeasurement.getElementsByTagName("AttitudeParameter")[0]
AttData = AttitudeParameter.getElementsByTagName("AttData")
for item in AttData:
UTC = item.getElementsByTagName("UTC")[0].firstChild.data
roll = item.getElementsByTagName("Roll")[0].firstChild.data
pitch = item.getElementsByTagName("Pitch")[0].firstChild.data
yaw = item.getElementsByTagName("Yaw")[0].firstChild.data
UTCs.append(float(UTC))
Rolls.append(float(roll))
Pitchs.append(float(pitch))
Yaws.append(float(yaw))
return UTCs, Rolls, Pitchs, Yaws
# main函数
if __name__ == '__main__':
# 第一步
# 分别读取姿态与行时文件
UTCs, Rolls, Pitchs, Yaws = readAttFile("VAZ1_201707010006_001.att")
FrameNum, UTC = readTimeFile("VAZ1_201707010006_001.time")
# 第二步
# 直接调用函数对Roll、Pitch、Yaw分别进行数据内插,得到内插函数
# 内插即是寻找自变量(UTC)与因变量(Roll、Pitch、Yaw)的关系
f_Roll = interp1d(UTCs, Rolls, kind='cubic')
f_Pitch = interp1d(UTCs, Pitchs, kind='cubic')
f_Yaw = interp1d(UTCs, Yaws, kind='cubic')
# 由于是内插,所以不能“外推”(如果是拟合就没这个问题了)
# 也就是说行时文件的开始与结束时间不能超过姿态文件中时间的范围
# 所以需要对行时文件中的数据进行筛选
# 对于超过的那些帧,直接丢弃,暂不做处理
good_UTC = []
good_FrameNum = []
for num, utc in zip(FrameNum, UTC):
if UTCs[0] <= utc <= UTCs[-1]:
good_FrameNum.append(num)
good_UTC.append(utc)
# 第三步
# 调用内插函数对行时文件中的数据进行内插,得到结果
pred_Roll = f_Roll(good_UTC)
pred_Pitch = f_Pitch(good_UTC)
pred_Yaw = f_Yaw(good_UTC)
# 第四步
# 新建一个文本文件名字叫att.txt用于存放内插出的数据
save_file = file("att.txt", 'w')
save_file.write("FrameNum\tUTC\tRoll\tPitch\tYaw\n")
# 对于每一帧的数据都逐行输出到控制台以及写入文本文件
for i in range(good_UTC.__len__()):
print good_FrameNum[i], good_UTC[i], pred_Roll[i], pred_Pitch[i], pred_Yaw[i]
save_file.write(good_FrameNum[i].__str__() + "\t" +
good_UTC[i].__str__() + "\t" +
pred_Roll[i].__str__() + "\t" +
pred_Pitch[i].__str__() + "\t" +
pred_Yaw[i].__str__() + "\n")
# 写入完成后,别忘关闭文件输出流
save_file.close()
# 至此,内插完成。可以将内插的数据与真实数据进行比较
plt.figure(1) # 图像编号
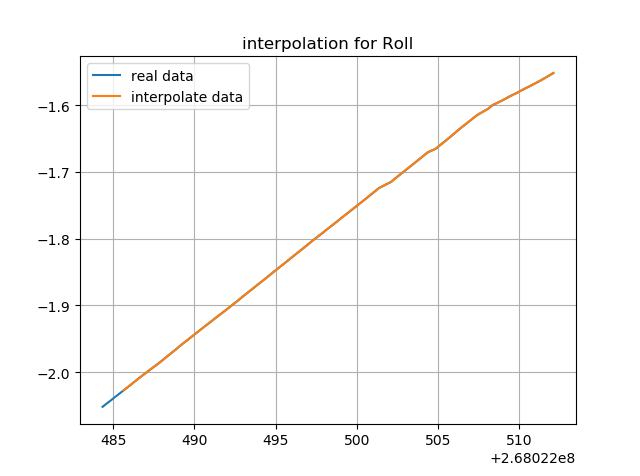
plt.title("interpolation for Roll") # 图像标题
plt.plot(UTCs, Rolls, label='real data')
plt.plot(good_UTC, pred_Roll, label='interpolate data')
plt.legend() # 显示图例
plt.grid() # 显示格网
plt.figure(2)
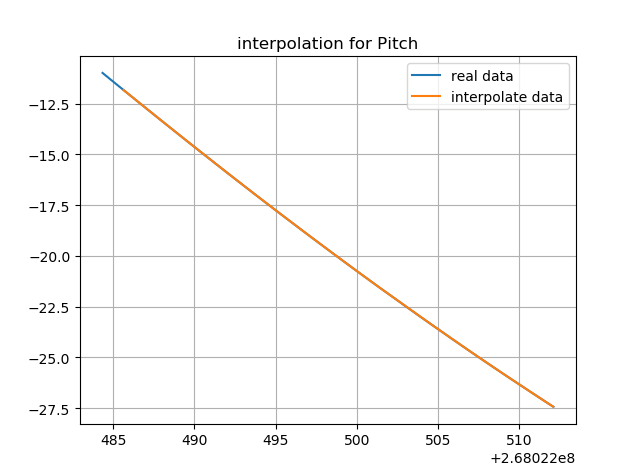
plt.title("interpolation for Pitch")
plt.plot(UTCs, Pitchs, label='real data')
plt.plot(good_UTC, pred_Pitch, label='interpolate data')
plt.legend()
plt.grid()
plt.figure(3)
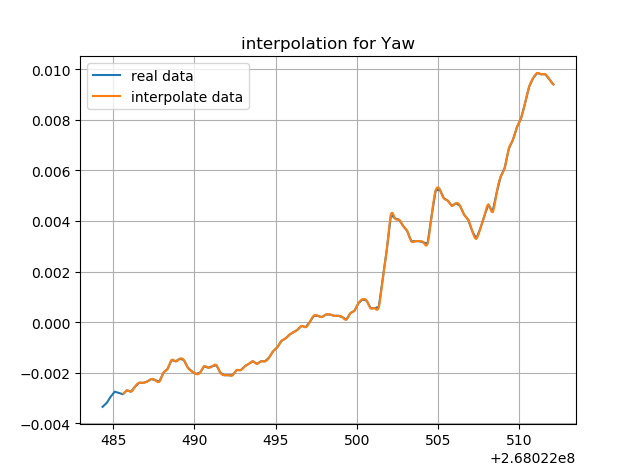
plt.title("interpolation for Yaw")
plt.plot(UTCs, Yaws, label='real data')
plt.plot(good_UTC, pred_Yaw, label='interpolate data')
plt.legend()
plt.grid()
plt.show()
这里简单说一下内插与拟合的区别。简单来说就是内插只能“内推”也就是计算内插数据之内的数据,不能计算范围之外的。而拟合则没有限制,可以外推,但精度相较于内插可能会有所下降。 举个例子,如用于内插的x数据范围是10到20,那么可以计算x=15时的y值,但是算不了x=5的y,因为超出了范围。而拟合会得到一个函数,x=5或15都可以计算。
2.运行结果
代码运行后,便会内插出各帧的卫星姿态,并且会将结果保存在att.txt中。同时会调用Matplotlib绘图,如下。
代码脚本以及实验用的数据放在了Github上,感兴趣可以Star或Fork,点击查看。
本文作者原创,未经许可不得转载,谢谢配合
