本篇博客主要介绍ROS的传感器使用——RGB相机以及对应的消息类型sensor_msgs/Image、ROS中用于和OpenCV数据交换的cv_bridge模块。
1.准备工作与基础知识
一般常见的USB摄像头在ROS中名称是USB video device class(UVC),UVC相机。在ROS中,要想调用摄像头有多种方法,例如和之前一样从OpenCV来调用摄像头等。这里通过ROS的uvc_camera功能包实现,更多与相机有关的内容可参考官方文档。
(1)安装uvc camera功能包
终端输入如下命令即可安装。
apt-get install ros-kinetic-uvc-camera
(2)安装image相关功能包
终端输入如下命令即可安装。
apt-get install ros-kinetic-image-*
apt-get install ros-kinetic-rqt-image-view
(3)通过ROS调用摄像头
我们需要先启动roscore,然后在终端中输入rosrun uvc_camera uvc_camera_node,ROS就会自动帮我们打开摄像头了,如下。
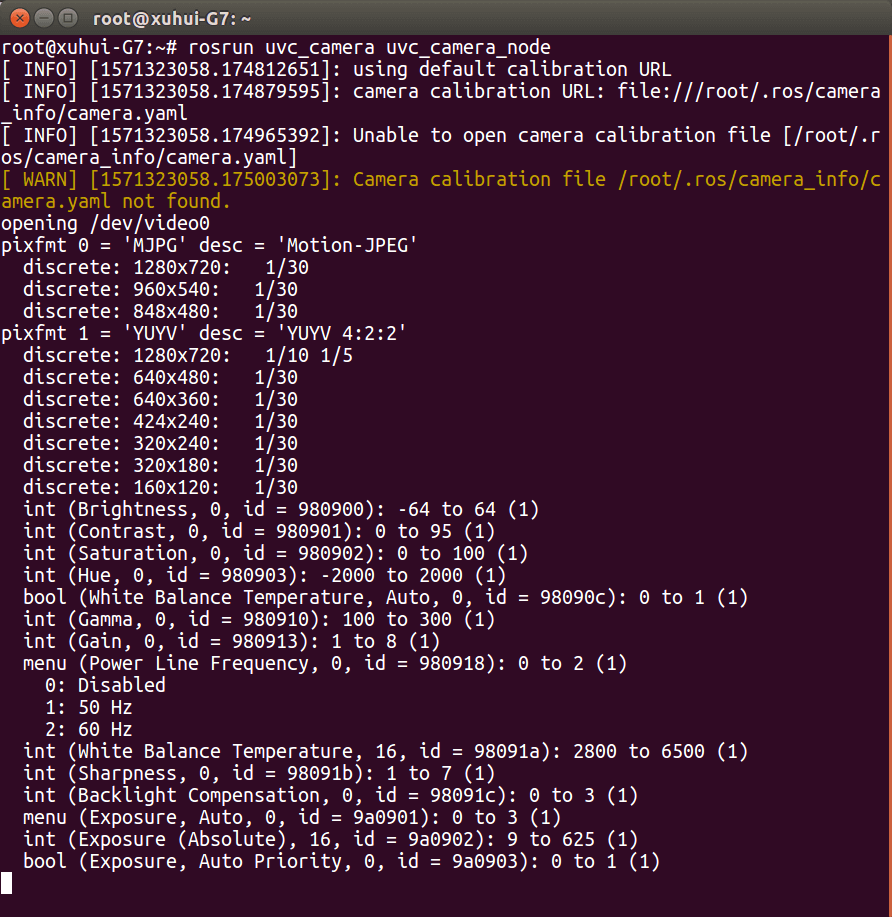 需要注意的是启动
需要注意的是启动uvc_camera_node后并不会展示出图像来,而是这个节点创建了多个Topic,直接向它们发送数据,我们可以使用rostopic list查看,如下。
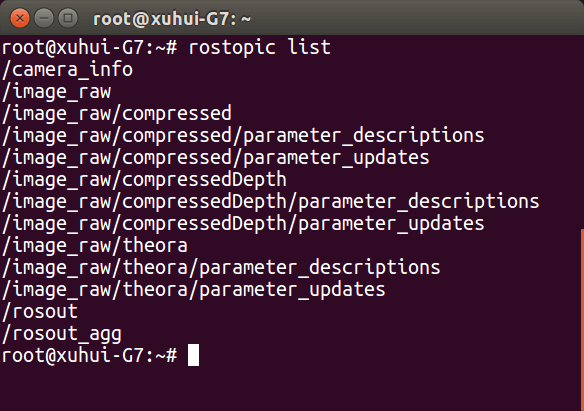 可以看到很多个以
可以看到很多个以/image_raw为根节点的Topic,而我们需要的就是根节点/image_raw上的数据。
(4)查看图像
知道了uvc_camera_node是在向Topic不断发送数据后就可以有多种办法查看数据了,如用Rviz或者自己写Subscriber订阅查看等等。这里介绍三种:
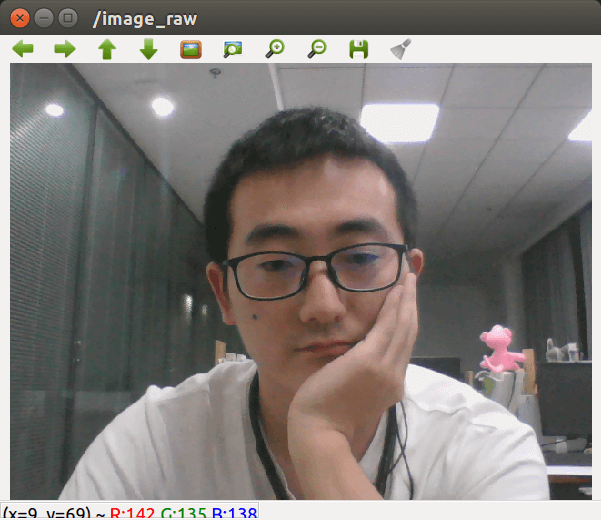
a.image_view节点
在终端中输入如下内容即可查看影像:
rosrun image_view image_view image:=/image_raw
最后一个image:=表示订阅的Topic名称,uvc_camera_node节点发布的原图数据就是/image_raw,直接填它就行。效果如下:
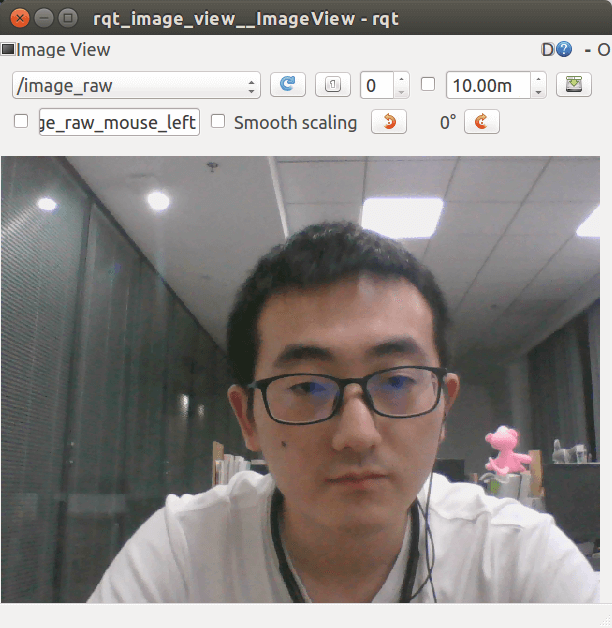
b.rqt_image_view节点
在终端中输入如下内容即可查看影像:
rqt_image_view image:=/image_raw
参数解释同上,效果如下。
c.Rviz
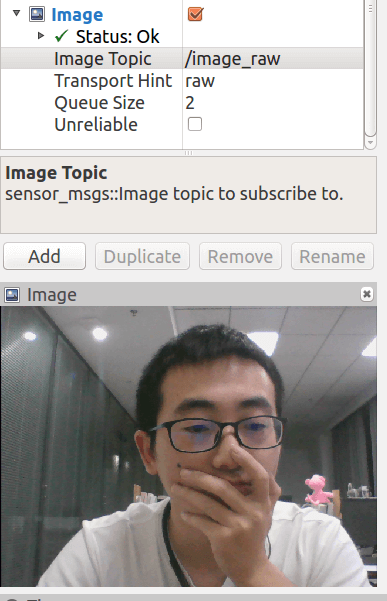
在终端中输入rviz打开软件,然后点击左下角的“Add”按钮,在“By display type”标签中选择“Image”,点击“OK”。然后在Image的属性里找到“Image Topic”,选择/image_raw即可,效果如下:
 其它与RGB相机有关的知识,如ROS自带的相机标定功能等可以参考《ROS Robot Programming》这本书的8.3节,写得很好,也有中文版。
其它与RGB相机有关的知识,如ROS自带的相机标定功能等可以参考《ROS Robot Programming》这本书的8.3节,写得很好,也有中文版。
2.待实现功能描述
我们希望利用ROS获取摄像头的视频流,并对视频流进行实时处理,最后将处理后的数据再发布给其它节点调用。
在这个场景下,我们首先需要启动uvc_camera_node这个节点来实时读取相机的数据,它会自动把数据发布到/image_raw这个Topic上。我们可以建一个叫camera_process的包,包含一个接收数据并处理的节点receive_process,然后将处理好的数据发布到/processed_img这个Topic上,最后由节点show_img接收/processed_img上的数据并展示出来。这里让节点同步收发消息采用的方法是全局变量法,没有使用类的办法,更多介绍多Topic收发的内容可参考这篇博客。
注意ROS中有自己定义的影像传输格式sensor_msgs/Image.h,所以要想和OpenCV进行数据交换,最简单的办法就是用ROS中的cv_bridge库,其中已经写好了很多类型转换函数方便调用。
3.C++实现
创建包时需要包含roscpp、sensor_msgs、std_msgs、cv_bridge以及OpenCV,最后别忘了link一下OpenCV的库。
(1)receive_process节点代码
# include<ros/ros.h> // ROS头文件
# include<cv_bridge/cv_bridge.h> // cv_bridge头文件,实现类型转换
# include<sensor_msgs/Image.h> // ROS相机传感器数据格式
# include<opencv-3.3.1-dev/opencv2/opencv.hpp> //OpenCV核心头文件
// 定义的全局变量
ros::Subscriber sub;
ros::Publisher pub;
// 对彩色图像进行灰度直方图均衡化,增强对比度
cv::Mat imgStretch(cv::Mat cv_img){
cv::Mat img_hsv;
cv::cvtColor(cv_img,img_hsv,cv::COLOR_BGR2HSV);
std::vector<cv::Mat> hsv_bands;
cv::split(img_hsv,hsv_bands);
cv::equalizeHist(hsv_bands[2],hsv_bands[2]);
cv::Mat equal_img;
cv::merge(hsv_bands,equal_img);
cv::cvtColor(equal_img,equal_img,cv::COLOR_HSV2BGR);
return equal_img;
}
cv::Mat cvtImgMsg2Mat(const sensor_msgs::ImageConstPtr& msg){
// 利用cv_bridge::toCvCopy函数将消息格式的图片转成CV格式
cv_bridge::CvImagePtr cvImgPtr;
cvImgPtr = cv_bridge::toCvCopy(msg,sensor_msgs::image_encodings::BGR8);
return cvImgPtr->image;
}
sensor_msgs::ImagePtr cvtMat2ImgMsg(cv::Mat img){
// 利用cv_bridge::CvImage函数将CV图像再次转成消息格式
sensor_msgs::ImagePtr img_msg;
img_msg = cv_bridge::CvImage(std_msgs::Header(),"bgr8",img).toImageMsg();
return img_msg;
}
void callback(const sensor_msgs::ImageConstPtr& msg){
// 调用函数,将msg格式img转成mat
cv::Mat img = cvtImgMsg2Mat(msg);
// 对转换后的数据进行处理
cv::Mat equal_img = imgStretch(img);
// 将处理后的数据重新转成msg格式
sensor_msgs::ImagePtr img_msg = cvtMat2ImgMsg(equal_img);
// 发送处理后的数据
pub.publish(img_msg);
}
int main(int argc, char *argv[])
{
// 初始化节点并指定名称
ros::init(argc, argv, "receive_process");
// 新建节点管理器
ros::NodeHandle nh;
// 初始化pub和sub
sub = nh.subscribe("image_raw",1,callback);
pub = nh.advertise<sensor_msgs::Image>("processed_img",1);
// 循环执行
ros::spin();
return 0;
}
(2)show_img节点代码
# include<ros/ros.h> // ROS头文件
# include<cv_bridge/cv_bridge.h> // cv_bridge头文件,实现类型转换
# include<sensor_msgs/Image.h> // ROS相机传感器数据格式
# include<opencv-3.3.1-dev/opencv2/opencv.hpp> //OpenCV核心头文件
// 定义的全局变量
ros::Subscriber sub;
cv::Mat cvtImgMsg2Mat(const sensor_msgs::ImageConstPtr& msg){
// 利用cv_bridge::toCvCopy函数将消息格式的图片转成CV格式
cv_bridge::CvImagePtr cvImgPtr;
cvImgPtr = cv_bridge::toCvCopy(msg,sensor_msgs::image_encodings::BGR8);
return cvImgPtr->image;
}
void callback(const sensor_msgs::ImageConstPtr& msg){
// 调用函数,将msg格式img转成mat
cv::Mat img = cvtImgMsg2Mat(msg);
// 展示图像
cv::imshow("processed_img",img);
cv::waitKey(3);
}
int main(int argc, char *argv[])
{
// 初始化节点并指定名称
ros::init(argc, argv, "show_img");
// 新建节点管理器
ros::NodeHandle nh;
// 初始化pub和sub
sub = nh.subscribe("processed_img",1,callback);
// 循环执行
ros::spin();
return 0;
}
4.Python实现
相比于C++,新建包时只需要依赖rospy即可。
(1)receive_process代码
根据之前的习惯,src文件夹里一般放C/C++文件,Python代码一般放在scripts文件夹里。代码如下:
# coding=utf-8
import rospy # ROS库
from sensor_msgs.msg import Image # ROS中接收传感器的图片格式,要注意的是别漏了.msg,否则导入失败
import cv_bridge # 用于方便实现OpenCV与ROS的类型转换
import cv2 # OpenCV库
# 相关内容在之前OpenCV笔记中已经说过,此处不再赘述
def imgStretch(cv_img):
img_hsv = cv2.cvtColor(cv_img, cv2.COLOR_BGR2HSV)
img_h = img_hsv[:, :, 0]
img_s = img_hsv[:, :, 1]
img_v = img_hsv[:, :, 2]
equal_img_v = cv2.equalizeHist(img_v)
img_hsv[:, :, 2] = equal_img_v
equal_img = cv2.cvtColor(img_hsv, cv2.COLOR_HSV2BGR)
return equal_img
# 接收到数据后的回调函数
def callback(img):
# 新建一个cv_bridge对象
bridge = cv_bridge.CvBridge()
# 调用bridge对象的成员函数imgmsg_to_cv2将ROS的Image转成OpenCV的NDArray
# 第一个参数是待转换数据
# 第二个参数是编码格式字符串,在sensor_msgs/image_encodings.h中有定义
cv_img = bridge.imgmsg_to_cv2(img, "bgr8")
# 调用直方图均衡化函数对彩色图像进行拉伸
equal_img = imgStretch(cv_img)
# 再次调用bridge的成员函数cv2_to_imgmsg将NDArray类型转成ROS的Image类型
# 第一个参数是待转换数据
# 第二个参数是待编码格式字符串,这里因为还是8位彩色图像,所以不变
img_msg = bridge.cv2_to_imgmsg(equal_img, "bgr8")
# 调用发布函数发布数据
pub.publish(img_msg)
# 调用OpenCV展示直接接收到的原始数据
cv2.imshow("data from camera", cv_img)
cv2.waitKey(3)
if __name__ == "__main__":
# 初始化节点并指定名称
rospy.init_node("receive_process")
# 新建Subscriber用于接收原始数据
# 第一个参数是接收Topic的名称
# 第二个参数是接收数据的类型
# 第三个参数是接收到数据后的回调函数
rospy.Subscriber("image_raw", Image, callback)
# 新建Publisher用于发布处理后的数据
# 第一个参数是发布的Topic名称
# 第二个参数是发布的数据类型
# 第三个参数是队列长度,一般是一个较小的整数即可
pub = rospy.Publisher("processed_img", Image, queue_size=1)
# 循环执行
rospy.spin()
(2)show_img代码
# coding=utf-8
import rospy # ROS库
from sensor_msgs.msg import Image # ROS中接收传感器的图片格式,要注意的是别漏了.msg,否则导入失败
import cv_bridge # 用于方便实现OpenCV与ROS的类型转换
import cv2 # OpenCV库
# 接收到数据后的回调函数
def callback(img):
# 新建一个cv_bridge对象
bridge = cv_bridge.CvBridge()
# 调用bridge对象的成员函数imgmsg_to_cv2将ROS的Image转成OpenCV的NDArray
cv_img = bridge.imgmsg_to_cv2(img, "bgr8")
cv2.imshow("data processed", cv_img)
cv2.waitKey(3)
if __name__ == "__main__":
# 初始化节点并指定名称
rospy.init_node("show_img")
# 新建Subscriber用于接收发布的处理后的数据
rospy.Subscriber("processed_img", Image, callback)
# 循环执行
rospy.spin()
(3)运行测试
首先在终端中输入roscore启动ROS,然后输入rosrun uvc_camera uvc_camera_node打开摄像头。然后可以切换到脚本路径下,输入python receive_process.py启动接收-处理-发送数据的节点。输入rostopic list即可以看到我们发布的Topic了,并且还可以查看它的信息,如下。
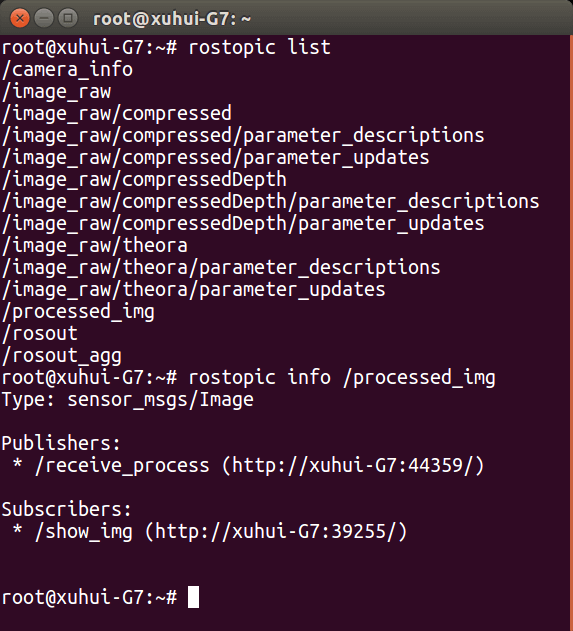 然后输入
然后输入python show_img.py启动展示节点,最终运行效果如下。
 受限于录制的GIF质量,效果没有直接看明显。但也可以能看出来右边影像对比度比左边要大一些,背景部分更黑了。
受限于录制的GIF质量,效果没有直接看明显。但也可以能看出来右边影像对比度比左边要大一些,背景部分更黑了。
运行时的Topic/Node图如下:
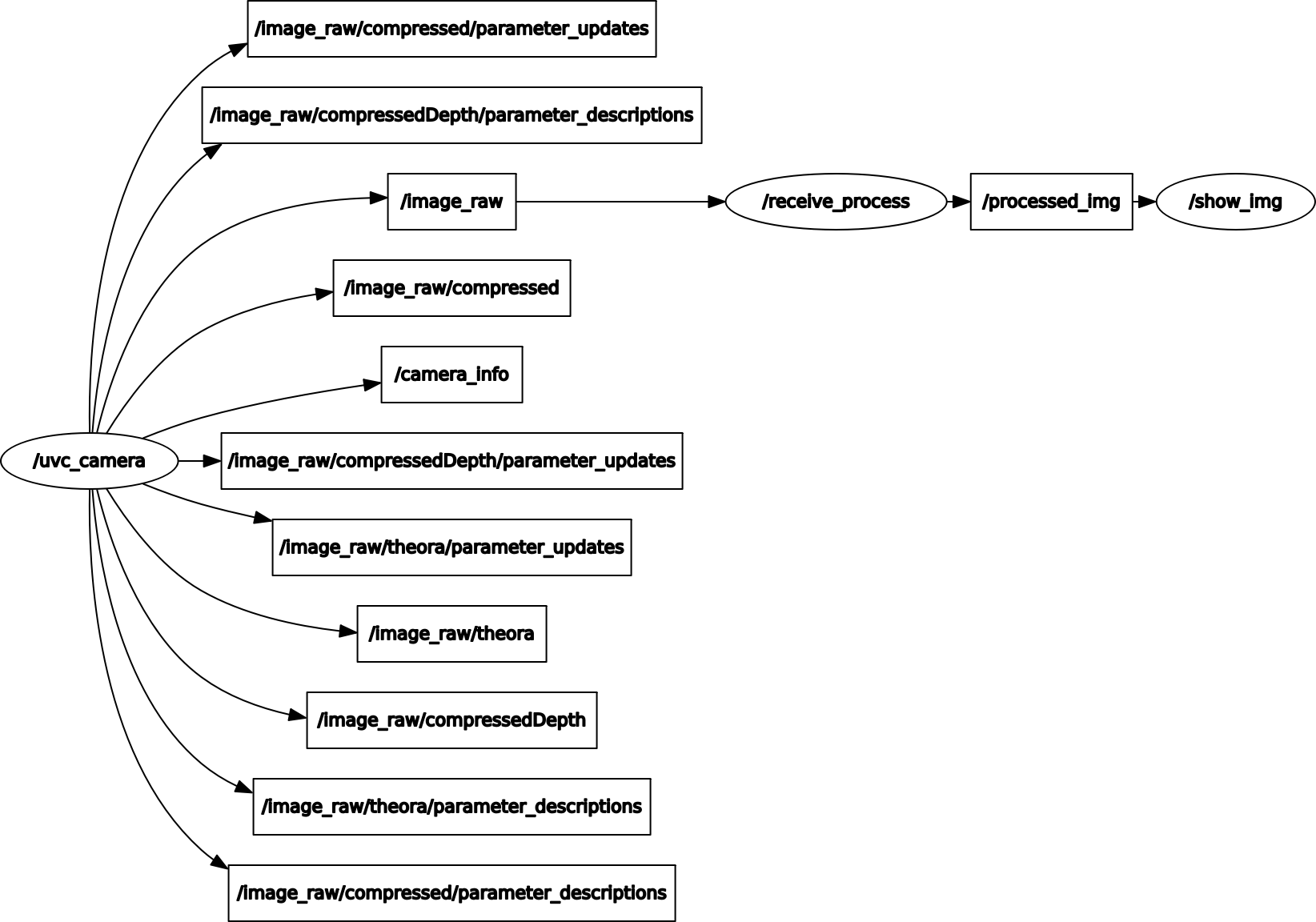 可以看到
可以看到/uvc_camera节点发布了很多个Topic,其中/image_raw被我们写的节点/receive_process接受并处理,处理完成之后发布到/processed_img,这个Topic又被我们写的show_img节点所订阅,用于展示。
最后,所有代码上传到了Github,点击查看。
5.参考资料
- [1]http://wiki.ros.org/Sensors/Cameras
- [2]http://wiki.ros.org/cv_bridge/Tutorials/UsingCvBridgeToConvertBetweenROSImagesAndOpenCVImages
本文作者原创,未经许可不得转载,谢谢配合
